I’m running through the 21 part drone building video course “How to Build a Drone” that came with the drone kit purchase. I got through to the Fixing Power Module to Frame except that I had issues in an earlier step with calibrating the ESCs. But before I repeated the Calibrating ESCs (X6B Receiver) step I used Mission Planner (MP) to flash the firmware as well as additional calibration of other H/W. I went through the calibration of the ESCs in MP but could not get the motors to respond. I then repeated the Calibrating ESCs (X6B Receiver) step from the course and finally got the motors to respond.
Woot! All was good in Mudville.
Then I proceeded to the “Correct Motor Spin Direction” step. There were 2 motors that needed to be adjusted per the directions in the video by switching any 2 corrections between the ESC and the motor. I did that to one of the motors, tested it and everything worked fine. I did the same to the other motor, went to test it and I could not get ANY of the motors to respond.
“Testing it” meant simply starting the transmitter with trottle down, plugging in the battery, moving the trottle to the lower right for > 1 sec and then moving the trottle up.
I’ve ran through the calibration sequence MANY times it an attempt to get the ESCs calibrated.
6. Wait for your ESCs to emit the musical tone, the regular number of beeps indicating your battery’s cell count (i.e. 3 for 3S, 4 for 4S) and then an additional two beeps to indicate that the maximum throttle has been captured.
I’ve disconnected 3 of the motors and their ESCs from the Pixhawk trying to isolate the issue with no luck. At this point I’m pretty much tapped out and really lost confidence in getting this build completed.
Any help and/or advice would be greatly appreciated.
I connected the motors up and went to MP as directed. I did not calibrate the ESCs but did ARM it via the MP UI. To calibrate the ESCs I went back to the “all-in-one” approach per the Calibrating ESCs (X6B Receiver) step from the course. That was successful and I got the ESCs and motors reponding. So back to where I started.
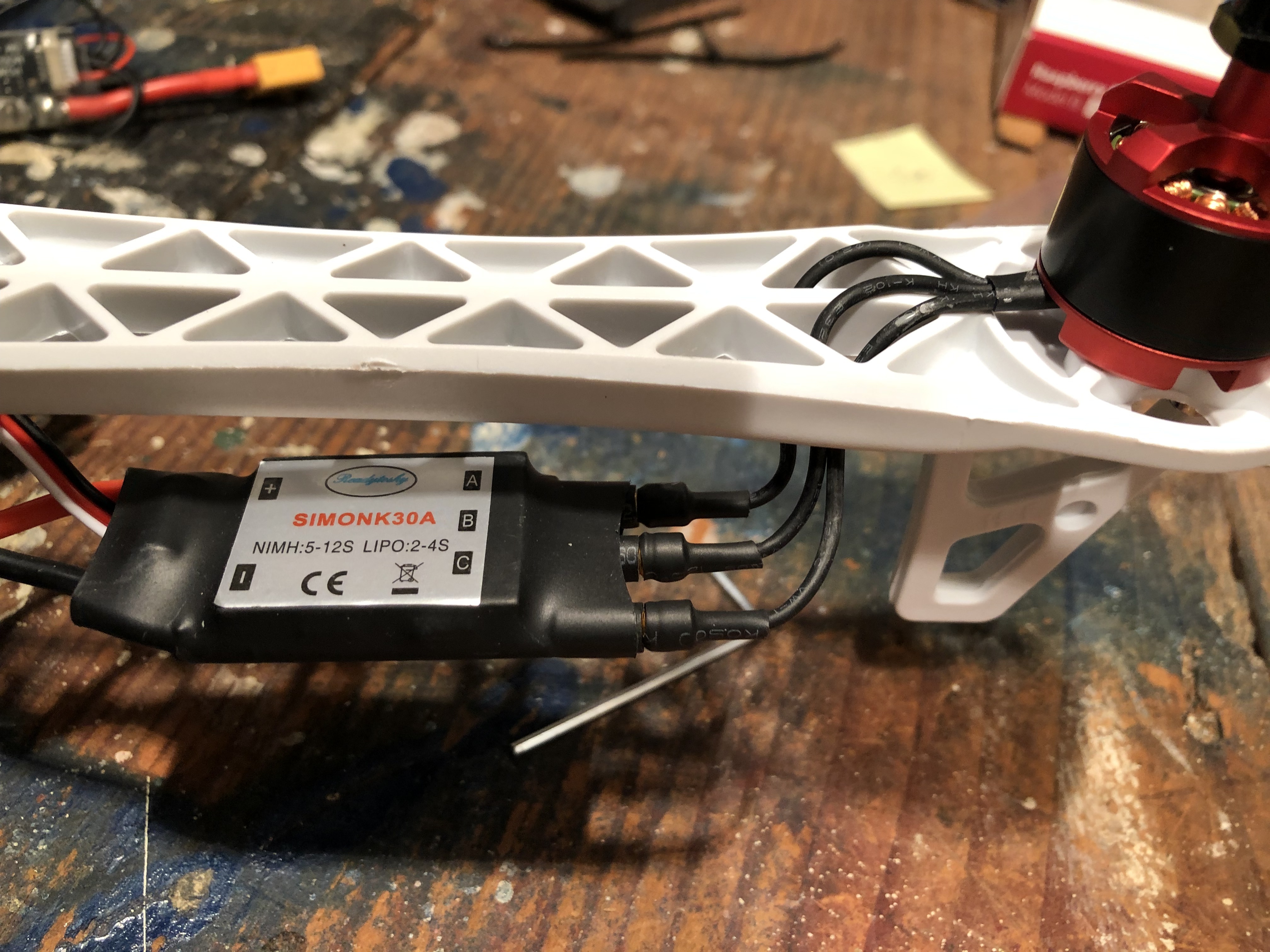
From there I had 2 motors spinning in the wrong direction that needed correcting. I switched 2 of the 3 wires connecting to the ESC as instructed in the course on just one motor which caused it to stop spinning. I tried the same on the other motor with the same result. (Note: The ESCs that I received did not look the same as in the video as they seem to be a single component that didn’t require soldering the bullet connectors.) I couldn’t seem to get any combination to work so I simply switched the motors around to different legs, which seemed to work.
I now have the ESCs calibrated and motors turning in the right direction. However, there appears to be a problem with the connectors to one of the motors. On one of the motors, one or two of the connectors to the ESC seem to come loose and of course the motor shuts down. I reseated it several times and it spun up but I’m not really confident that it’s secure.
Any suggestions around the connector issue would be appreciated.
Also, is there a viable version of MP for Mac OS (Monterey)?
Your ESCs look like a typical brand. Moving them around to different arms would not matter. Moving the wires shouldn’t ‘stop’ a motor, just change the motor spin direction. As you state, it was probably due to loose connections. In the photo the bullet connection looks good. Perhaps the wire to the bullet came loose so you might want to remove the heat shrink and re-solder or just replace the esc. I wouldn’t fly this until you were certain movement wouldn’t affect the connection. You could maybe turn on the power (without props) and play with the wire to confirm this.
Yes, moving the motor to different arms would be necessary only if you didn’t have the right motor spin (ie, CW CCW) in the first place. The shaft of a CW vs CCW motor differs in order to secure the prop when it is moving. So make sure you have the correct motor on the correct arm.
Hey there @william.drew. Did you ever get past the ESC calibration phase? I am currently stuck on that phase as well. The reciever did bind, but after that, I couldnt get the the ESCs calibrated. Also, I havent flashed the pixhawk yet either, I dont know if that makes a difference or not. Any help will be greatly appreciated, thanks!