I’m connecting over Telemetry if that makes any difference ?
I have also been advised to connect the Battery directly rather than via the ‘smoke stopper’ which came with the Kit purchased from DroneDoJo. I was experiencing only 2 props spinning properly but when connected directly all 4 now spin.
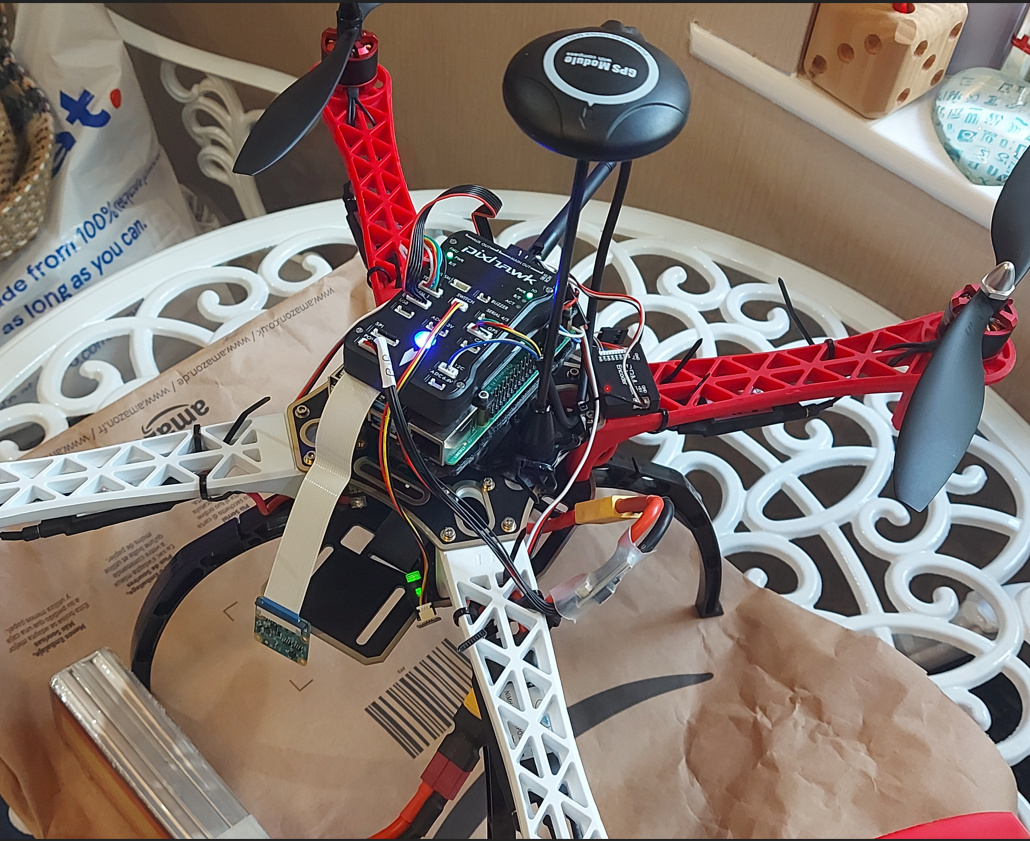
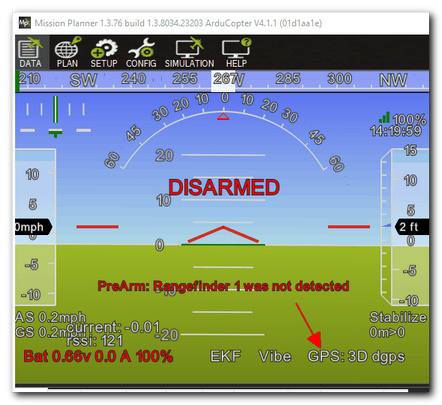
I have another issue i’m not understanding and will plug away at it but may raise another thread here - it’s the GPS as shown in the Pre-Flight output, outside and inside 0 Sats showing and blinnking Blue on Pixhawk.
Any advise is welcome , one day i will do the same in return , thanks all
I’m working my way through the Precision Landing course, after connecting that to Serial 4/5 following the info Benewake TF02 / TF03 lidar/ TF-Luna — Copter documentation (ardupilot.org) When i connect now, Motor A has stopped spinning but 3 others are fine via Motor Test and the documentation mentions sonarrange status which shows 0 when i check.
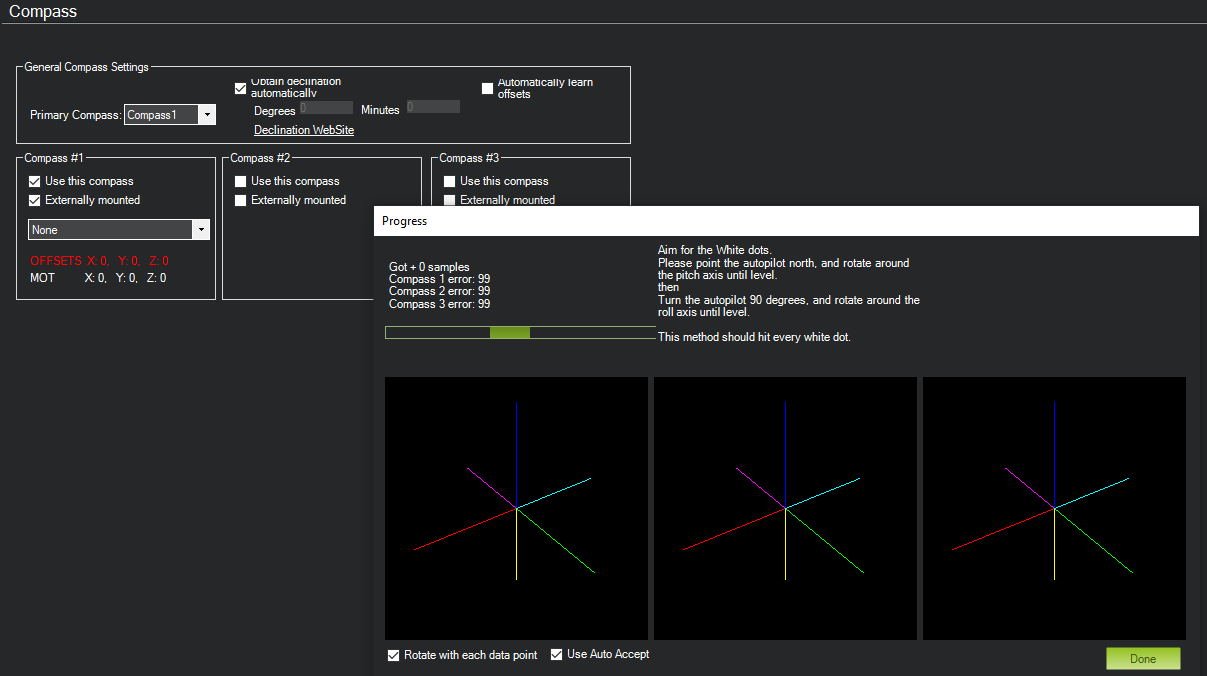
At the moment the drone does not have knowledge of the GPS even though it is connected and i have previously done compass calibration. Occasionally out the back when i do this step i see white dots but as i rotate the drone it follows the ‘flow’ of dots but then stops
Usually i just see what is above tho out the back, where no white dots appear
I know all the above sounds a lot of issues, i was expecting some problems when i first started this project and i’m still willing to learn to overcome these unforeseen ones. My main goal is programming the drone with Python whereas hardware aspects are of interest too but not my main strength at the moment. Not knowing for example to Smoke Stopper was a temporary thing to use caused me a long delay, still having it connected until Caleb said to remove it via email.
I was thinking about reverting to the original pixhawk but i thought i needed the USB connector for some reason, if i don’t then i could swap it back and see if it plays nicely with the GPS and Lidar module. As for Motor A no longer spinning , not thought about that at the moment. Each time i get something going something else happens.
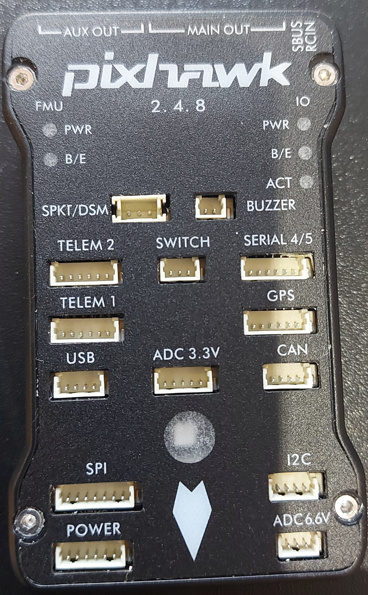
The naming conventions used can be confusing. There was a discontinued ‘PX4’ autopilot, and Holybro sells a ‘Pixhawk 4’.
The “PX4” logo on the side refers to an alternative firmware offered by Lorenz Meier in Zurich. We use ardupilot in this course. But this controller should accommodate ardupilot. You can always confirm with where you bought it (Unmanned Tech?).
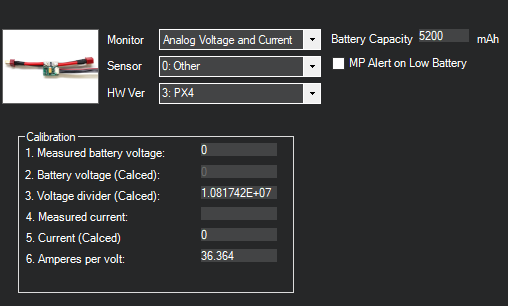
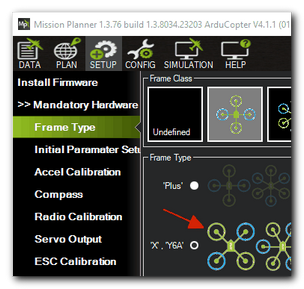
The telemetry indicates you have configured it for ‘OCTA’… octo? Run through the setup once again ensuring you are using the latest ardupilot firmware, configure for ‘QUAD/X’. Then in battery monitor use HW version ‘Pixhawk’. Using the incorrect setup might account for the GPS and motor issues.
With regards to your main goal of programming, I would recommend spending more time with the SITL. I do this to test out programs, then fly in the field.
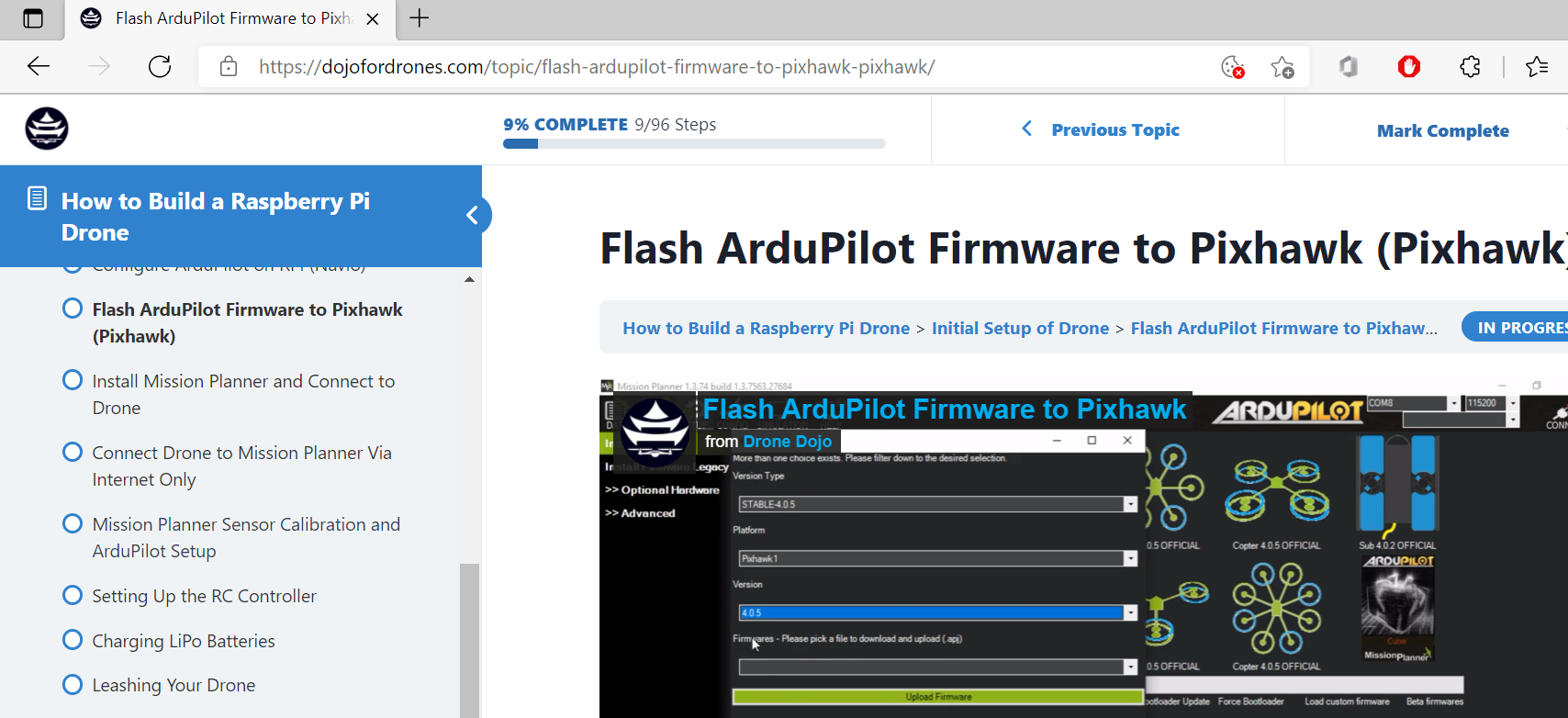
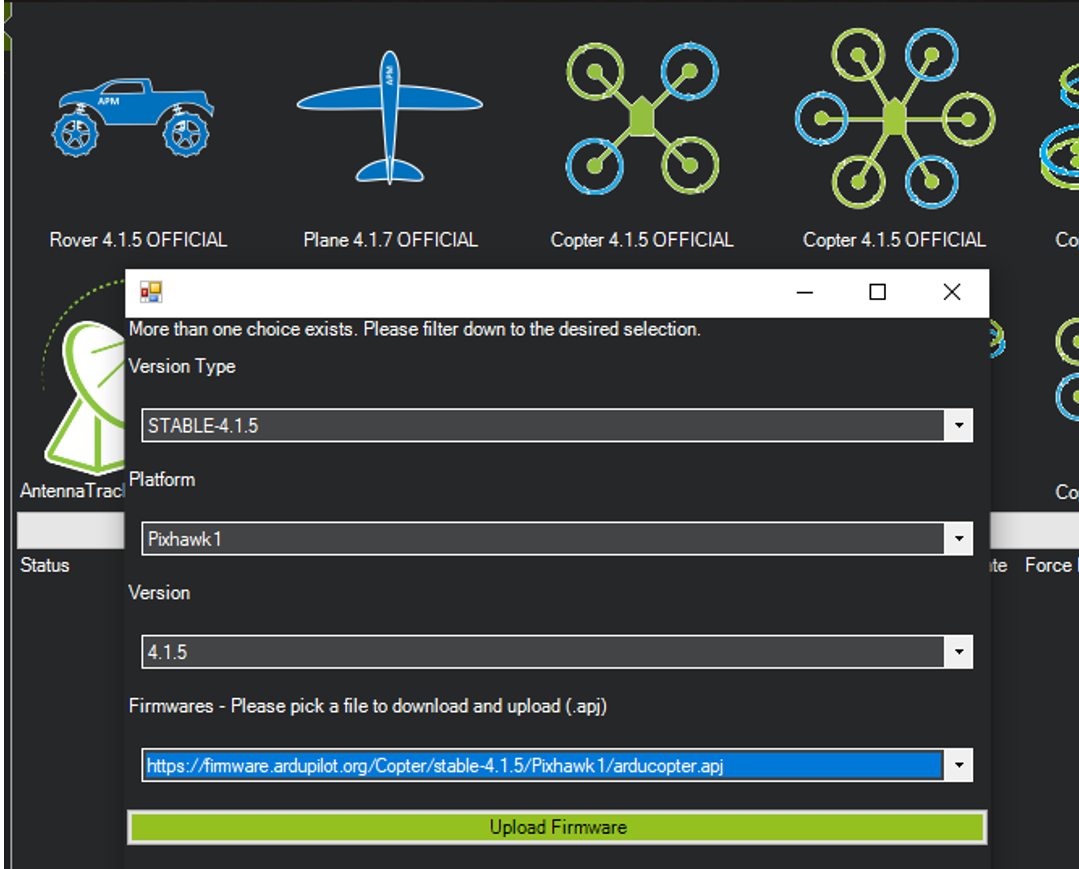
The video implies you can get the latest version that is supported and I have tried by clicking the Copter 4.1.5 Official , also did the same process to match the version in your screen shot. I have therefore tried both 4.1.5 and 4.1.1.
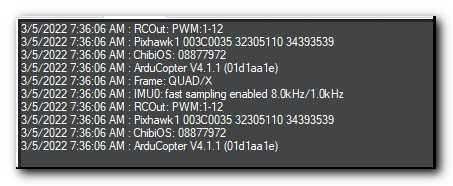
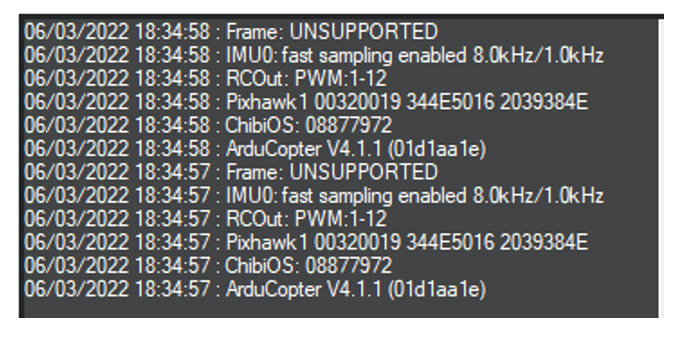
After the flashing completes and I reconnect, both versions show this
At one point it did say GPS1 was detected with the baud rate (that may have been the message display as part of 4.1.5 ) but as you can see above that does not show. I did a Calibration (left / Right etc) and it accepted it but the GPS Status still says 0.
As I was using the USB as shown on the course to Flash the Firmware it came back to me that’s what caused the connection to break on the one that came with the kit and as I needed the USB connection I needed a replacement one. If I am able to flash and do other things without the USB then I could connect the first one again, or perhaps from the firmware download options I need to choose a different option so that it recognises QUAD frame?
I don’t mind getting replacement parts if the unmanned one is the reason it does not all work , not sure where in the UK I can get one if so.
I’m also using SITL, learning the software and testing out scripts there and it will soon come a time when i need the drone to be flyable. At the moment i have never managed to raise the drone off the floor, by Mission planner or RC - both previously i was able to get the Motors spinning but now i can’t do that but Mission Planner does react in the Quick Tab and HUD when i move the drone so there is some good parameters coming through. Thanks