8 Misc
Suggest using VB snapshots after each major install.
This uses a different implementation of worlds (ie, sdf files)
Not all dependencies same as shown in course material.
Consider installation of virtualenv.
Use only python3.
9 Demo
Run Gazebo
gz sim -v4 -r iris_runway.sdf
Run ArduPilot SITL
To run an ArduPilot simulation with Gazebo, the frame should have gazebo- in it and have JSON as model. Other command line parameters are the same as usual on SITL.
Great intel. I have been hoping for an update on versions. Ardupilot version is 4.0.3?, Mavlink? Mavproxy? All the latest?? QGroundControl, still Windows only correct?? Thank you.
My last conversation with Emlid on the Navio2 was that it was good to go for Ardupilot 4.0.3. Do you think there will be any suprises if I use 4.3.2? This is not a fair question, I will just have to try 4.3.2, but I can likely do the 4.0.3 as well…??
This is great to know. Did you ever successfully work through the rest of the precision landing course with the updated versions? And if so what did you do to get it to work?
I have now completed this project using the above installations. Hopefully I will share this via a blog but in the meantime if anyone is interested you can email me. Now working to get the PL code to work with it.
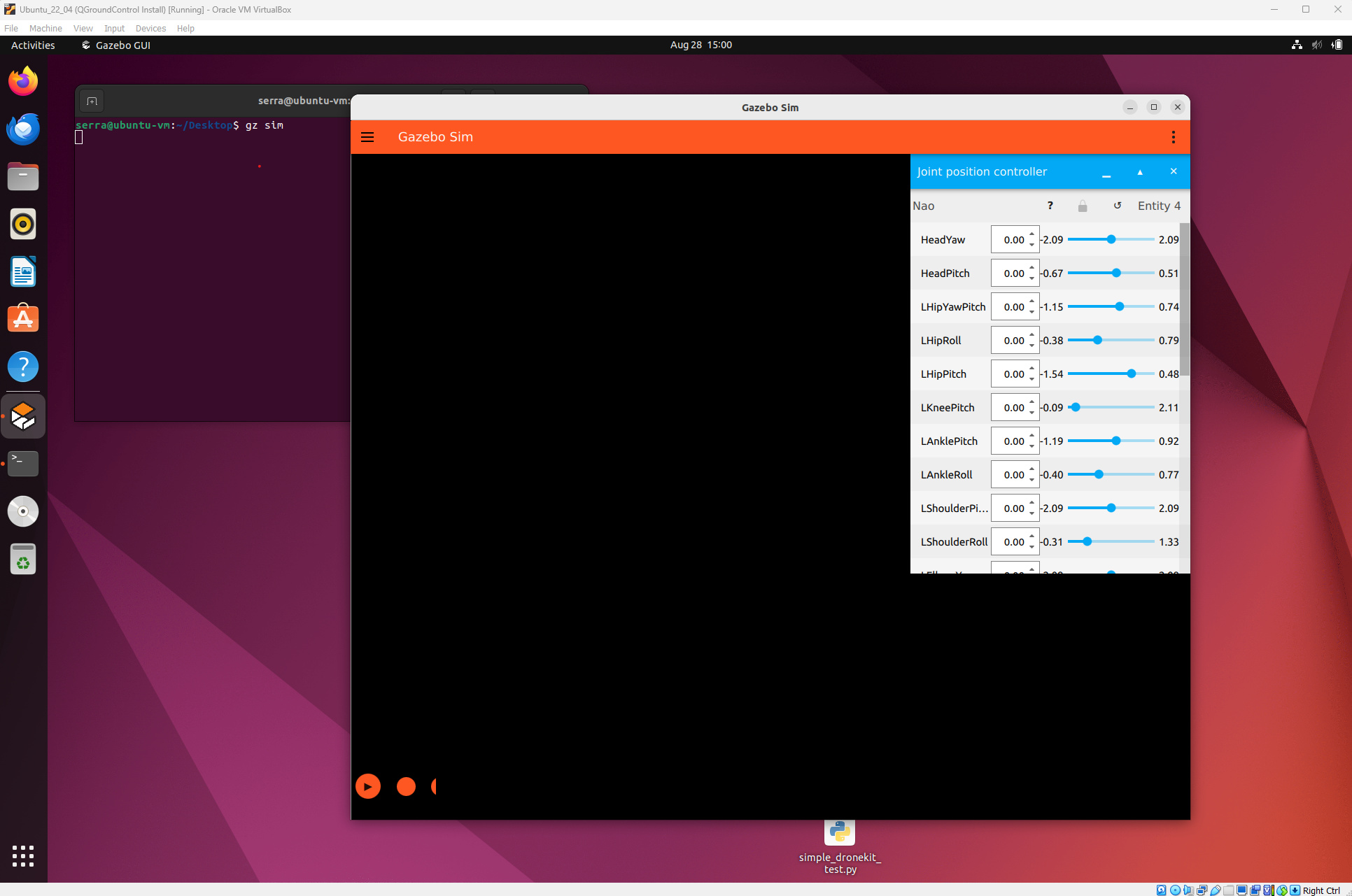
Hi @jax200 thanks so much for this guide. My first time building on here and I’m trying to follow this setup. Everything went smoothly until i got to Gazebo Harmonic install. When I run any gz sim it appears to start-up correctly, but then only renders a black screen. I’ve included some screen shots and system specs below. Any advice on how to proceed?
Host system:
Windows 11
i7 2.3ghz cpu
RAM: 16GB
NVIDIA RTX 3060
VM settings:
Virtualbox 7.0.20 (latest build)
RAM 4gb
Cores 4
Video memory: 128mb
Graphics controller: VMSVGA
3d accel enabled
Enabled next VT-x/AMD-V
Things i’ve tried:
Toggling 3D accel off and on – this actually resolves the black screen issue, but then makes Gazebo run incredibly slowly.
I am not a computer expert, but your resources seem to be sufficient.
There was no other program running concurrently?
You might confer with AI (CoPilot), which suggests VMware might work better.
Also make sure you have Guest Additions installed.