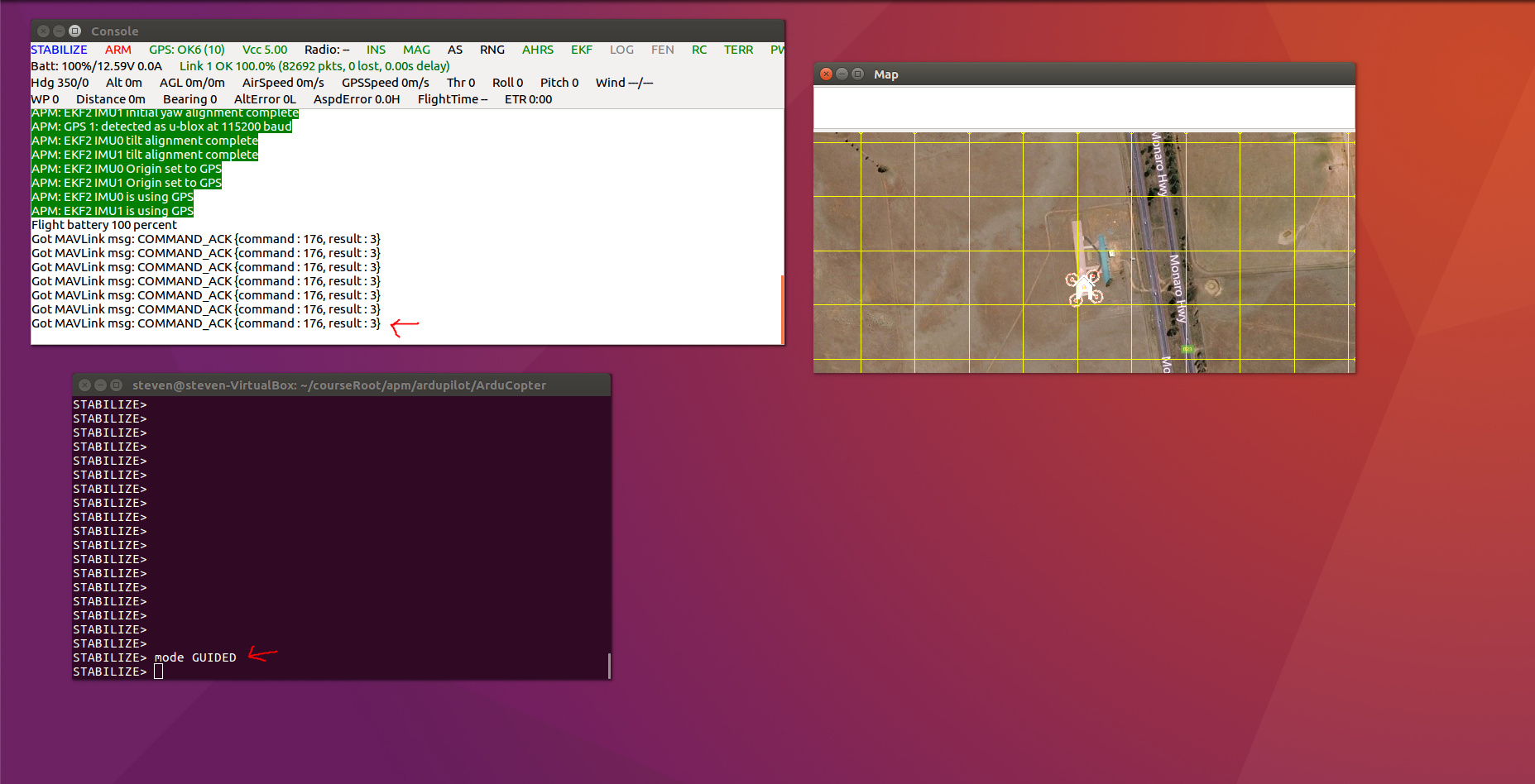
https://mavlink.io/en/messages/common.html
shows that MAV_CMD_DO_SET_MODE is number 176. I couldn’t find what result:3 means.
From lecture "Different Methods for Workstation/Environment Creation:
1.5 (Mixture of 1 and 2: RECOMMENDED!)
PROS:
*Access to environment that is confirmed to work to help you
rule out human error in debugging.
*If running into dependency issues, hop on the pre-configured
environment and investigate/note any dependency differences.
==============================================================================
There are a lot of moving parts in this software and all the different versions need to play well together.
After many hours of research to determine exactly what was causing the problem and not having any luck, I just decided, for no reason at all, to install a different version of Copter. Problem solved - go figure.
Below I have included some info on my environment. Hope it helps.
david@hp-office:~$ cat /etc/os-release
NAME=“Linux Mint”
VERSION=“19.3 (Tricia)”
ID=linuxmint
ID_LIKE=ubuntu
PRETTY_NAME=“Linux Mint 19.3”
VERSION_ID=“19.3”
HOME_URL=“https://www.linuxmint.com/”
SUPPORT_URL=“https://forums.ubuntu.com/”
BUG_REPORT_URL=“Linux Mint Troubleshooting Guide — Linux Mint Troubleshooting Guide documentation”
PRIVACY_POLICY_URL=“https://www.linuxmint.com/”
VERSION_CODENAME=tricia
UBUNTU_CODENAME=bionic
david@hp-office:~$ pip --version
pip 9.0.1 from /usr/lib/python2.7/dist-packages (python 2.7)
david@hp-office:~$ pip list | grep MAVProxy
MAVProxy (1.8.19)
david@hp-office:~$ pip list | grep pymavlink
pymavlink (2.4.9)
david@hp-office:~$ python
Python 2.7.17 (default, Apr 15 2020, 17:20:14)
[GCC 7.5.0] on linux2
Type “help”, “copyright”, “credits” or “license” for more information.
import sys
print ‘\n’.join(sys.path)
/usr/lib/python2.7
/usr/lib/python2.7/plat-x86_64-linux-gnu
/usr/lib/python2.7/lib-tk
/usr/lib/python2.7/lib-old
/usr/lib/python2.7/lib-dynload
/home/david/.local/lib/python2.7/site-packages
/usr/local/lib/python2.7/dist-packages
/usr/lib/python2.7/dist-packages
/usr/lib/python2.7/dist-packages/gtk-2.0
/usr/lib/python2.7/dist-packages/wx-3.0-gtk3
quit()
david@hp-office:~/courseRoot/apm$ git clone -b Copter-3.6 GitHub - ArduPilot/ardupilot: ArduPlane, ArduCopter, ArduRover, ArduSub source
david@hp-office:~/courseRoot/apm/ardupilot/ArduCopter$ sim_vehicle.py --console --map
SIM_VEHICLE: Start
SIM_VEHICLE: Killing tasks
SIM_VEHICLE: Starting up at -35.363261,149.165230,584,353 (CMAC)
SIM_VEHICLE: WAF build
SIM_VEHICLE: Configure waf
SIM_VEHICLE: “/home/david/courseRoot/apm/ardupilot/modules/waf/waf-light” “configure” “–board” “sitl”
Setting top to : /home/david/courseRoot/apm/ardupilot
Setting out to : /home/david/courseRoot/apm/ardupilot/build
Autoconfiguration : enabled
Setting board to : sitl
Checking for ‘g++’ (C++ compiler) : /usr/bin/g++
Checking for ‘gcc’ (C compiler) : /usr/bin/gcc
Checking for c flags ‘-MMD’ : yes
Checking for cxx flags ‘-MMD’ : yes
Checking for need to link with librt : not necessary
Checking for HAVE_CMATH_ISFINITE : yes
Checking for HAVE_CMATH_ISINF : yes
Checking for HAVE_CMATH_ISNAN : yes
Checking for NEED_CMATH_ISFINITE_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISINF_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISNAN_STD_NAMESPACE : yes
Checking for header endian.h : yes
Checking for header byteswap.h : yes
Checking for program ‘python’ : /usr/bin/python
Checking for python version >= 2.7.0 : 2.7.17
Checking for program ‘python’ : /usr/bin/python
Checking for python version >= 2.7.0 : 2.7.17
Source is git repository : yes
Update submodules : yes
Checking for program ‘git’ : /usr/bin/git
Checking for program ‘size’ : /usr/bin/size
Benchmarks : disabled
Unit tests : enabled
Checking for program ‘rsync’ : /usr/bin/rsync
‘configure’ finished successfully (1.995s)
SIM_VEHICLE: Building
SIM_VEHICLE: “/home/david/courseRoot/apm/ardupilot/modules/waf/waf-light” “build” “–target” “bin/arducopter”
Waf: Entering directory /home/david/courseRoot/apm/ardupilot/build/sitl' Waf: Leaving directory /home/david/courseRoot/apm/ardupilot/build/sitl’
BUILD SUMMARY
Build directory: /home/david/courseRoot/apm/ardupilot/build/sitl
Target Text Data BSS Total
bin/arducopter 1785216 75974 44032 1905222
Build commands will be stored in build/sitl/compile_commands.json
‘build’ finished successfully (1.573s)
SIM_VEHICLE: Using defaults from (/home/david/courseRoot/apm/ardupilot/Tools/autotest/default_params/copter.parm)
SIM_VEHICLE: Run ArduCopter
SIM_VEHICLE: “/home/david/courseRoot/apm/ardupilot/Tools/autotest/run_in_terminal_window.sh” “ArduCopter” “/home/david/courseRoot/apm/ardupilot/build/sitl/bin/arducopter” “-S” “-I0” “–home” “-35.363261,149.165230,584,353” “–model” “+” “–speedup” “1” “–defaults” “/home/david/courseRoot/apm/ardupilot/Tools/autotest/default_params/copter.parm”
SIM_VEHICLE: Run MavProxy
SIM_VEHICLE: “mavproxy.py” “–master” “tcp:127.0.0.1:5760” “–sitl” “127.0.0.1:5501” “–out” “127.0.0.1:14550” “–out” “127.0.0.1:14551” “–map” “–console”
RiTW: Starting ArduCopter : /home/david/courseRoot/apm/ardupilot/build/sitl/bin/arducopter -S -I0 --home -35.363261,149.165230,584,353 --model + --speedup 1 --defaults /home/david/courseRoot/apm/ardupilot/Tools/autotest/default_params/copter.parm
Option “-e” is deprecated and might be removed in a later version of gnome-terminal.#
Use “-- ” to terminate the options and put the command line to execute after it.#
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect tcp:127.0.0.1:5760 source_system=255
Loaded module console
Loaded module map
Log Directory:
Telemetry log: mav.tlog
MAV> Waiting for heartbeat from tcp:127.0.0.1:5760
STABILIZE>
STABILIZE> mode guided
STABILIZE> GUIDED>
GUIDED> Received 921 parameters