Not strictly related to a specific course but something most people will do to their drone afterwards, so…
I’m trying to mount a TL3T05 gimbal to the dronekit build. I mainly followed this video tutorial.
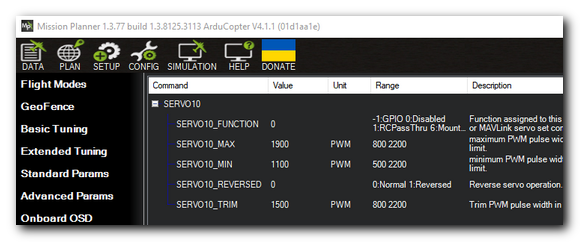
The gimbal has 2 3-pin connectors named CH1 and CH2, which I connected to Pixhawk’s ports 1 and 2 which afaik are the servo ports 9 and 10, just like in the video. The gimbal’s main power supply was directly connected to the battery input. In the radio calibration dialog in Mission Planner, the two silver knobs on the remote (FS-i6) labelled “VRA” and “VRB” seem to operate the channels 5 and 6.
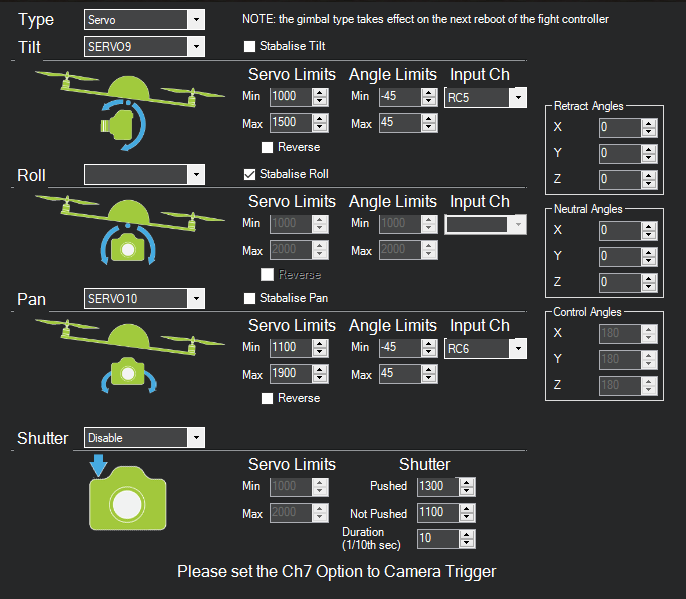
Altogether, I went to setup->optional hardware->camera gimbal and made the following settings:
I think, i got it.
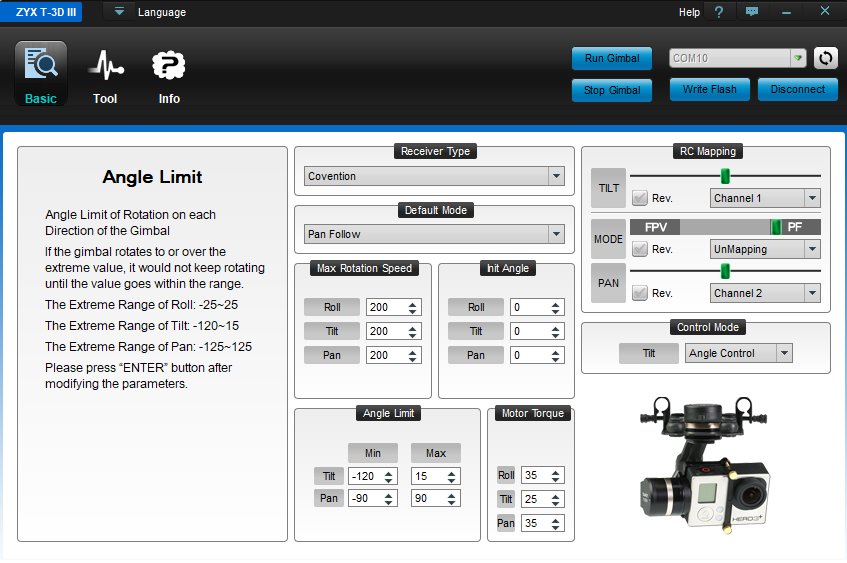
Ardupilot was indeed set up correctly. The problem was with Tarot’s software to calibrate the gimbal. It shows the following page to configure the gimbal:
Under RC Mapping, you need to set the channels on your remote that should operate the pan and tilt operations. If the gimbal is not connected to a remote but to some aux channels of a Pixhawk, the mappings need to be set to Channel 1 and Channel 2.
And one more word of caution: Before you do ANYTHING AT ALL with the gimbal software, go to the Tool view and make a backup of your parameters, as things like calibration can easily mess up your whole gimbal.