Hi, Thanks again for replying,
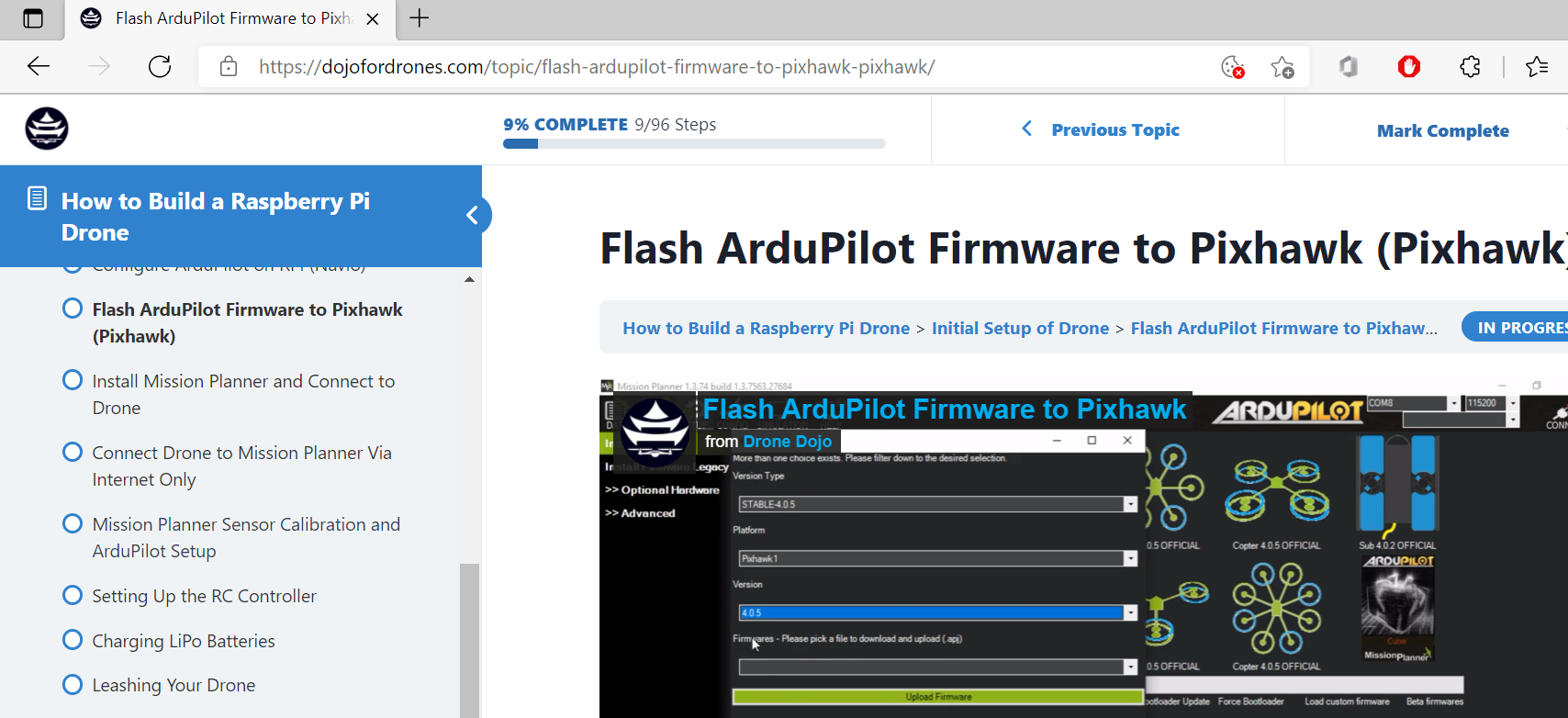
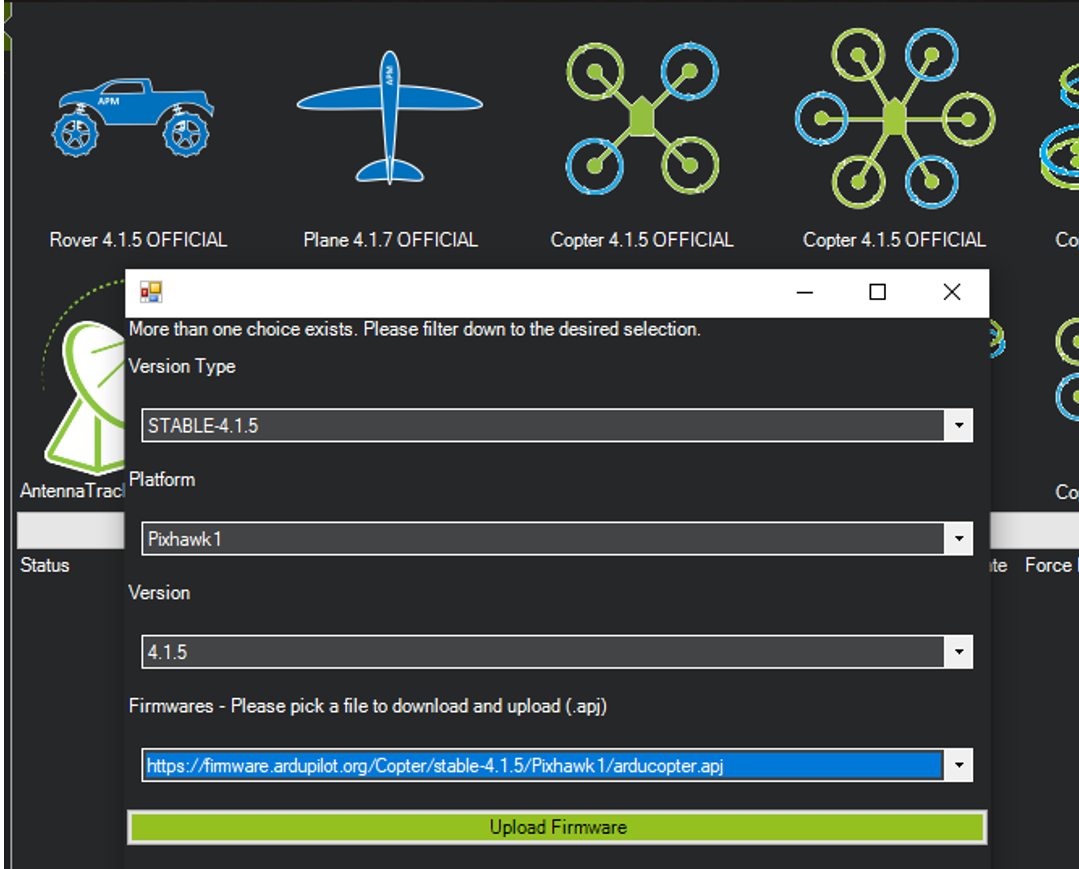
I returned to the course at this point to Flash Firmware –
and i choose …
The video implies you can get the latest version that is supported and I have tried by clicking the Copter 4.1.5 Official , also did the same process to match the version in your screen shot. I have therefore tried both 4.1.5 and 4.1.1.
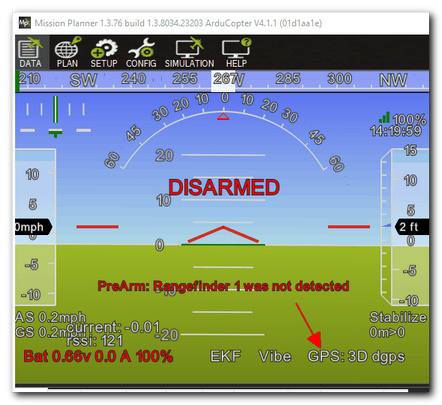
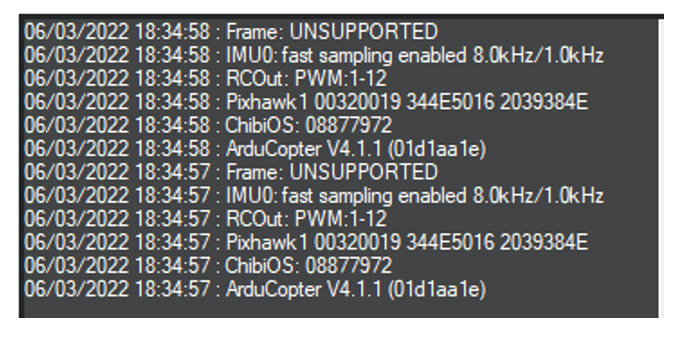
After the flashing completes and I reconnect, both versions show this
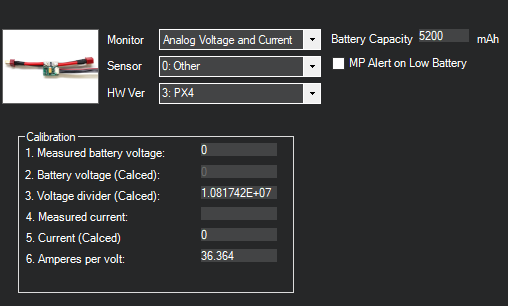
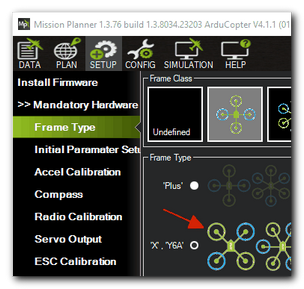
And it seems to timeout after a while then gets all the params, in Messages tho it quotes Unsupported Frame and I can’t do anything such as motor test
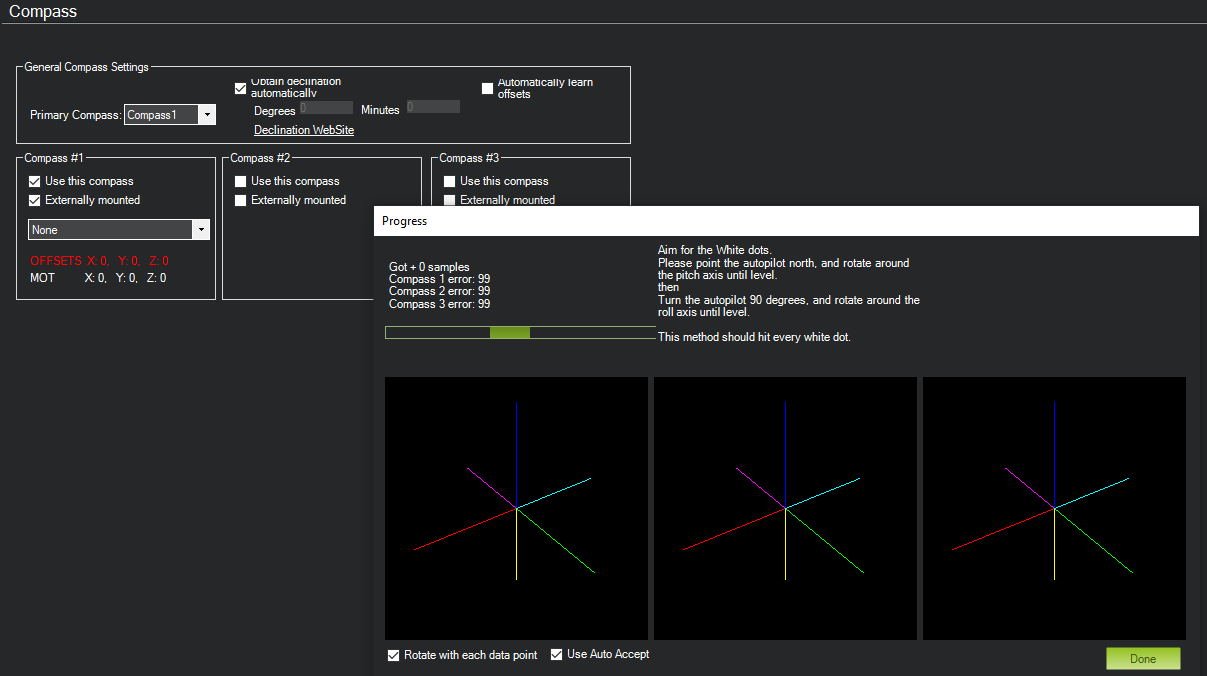
At one point it did say GPS1 was detected with the baud rate (that may have been the message display as part of 4.1.5 ) but as you can see above that does not show. I did a Calibration (left / Right etc) and it accepted it but the GPS Status still says 0.
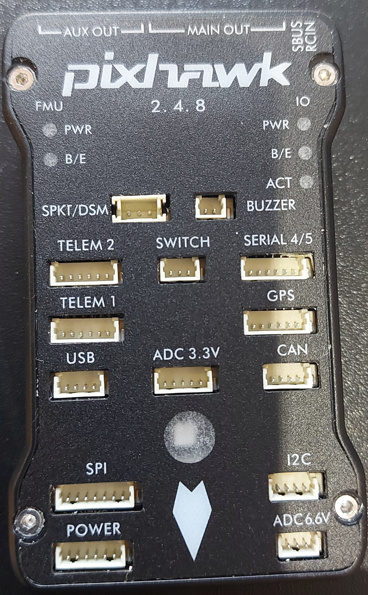
I did get the Pixhawk from Search results – Unmanned Tech UK FPV Shop (unmannedtechshop.co.uk) and they do quote AutoPilot board – seems like they have no stock of this now.
As I was using the USB as shown on the course to Flash the Firmware it came back to me that’s what caused the connection to break on the one that came with the kit and as I needed the USB connection I needed a replacement one. If I am able to flash and do other things without the USB then I could connect the first one again, or perhaps from the firmware download options I need to choose a different option so that it recognises QUAD frame?
I don’t mind getting replacement parts if the unmanned one is the reason it does not all work , not sure where in the UK I can get one if so.
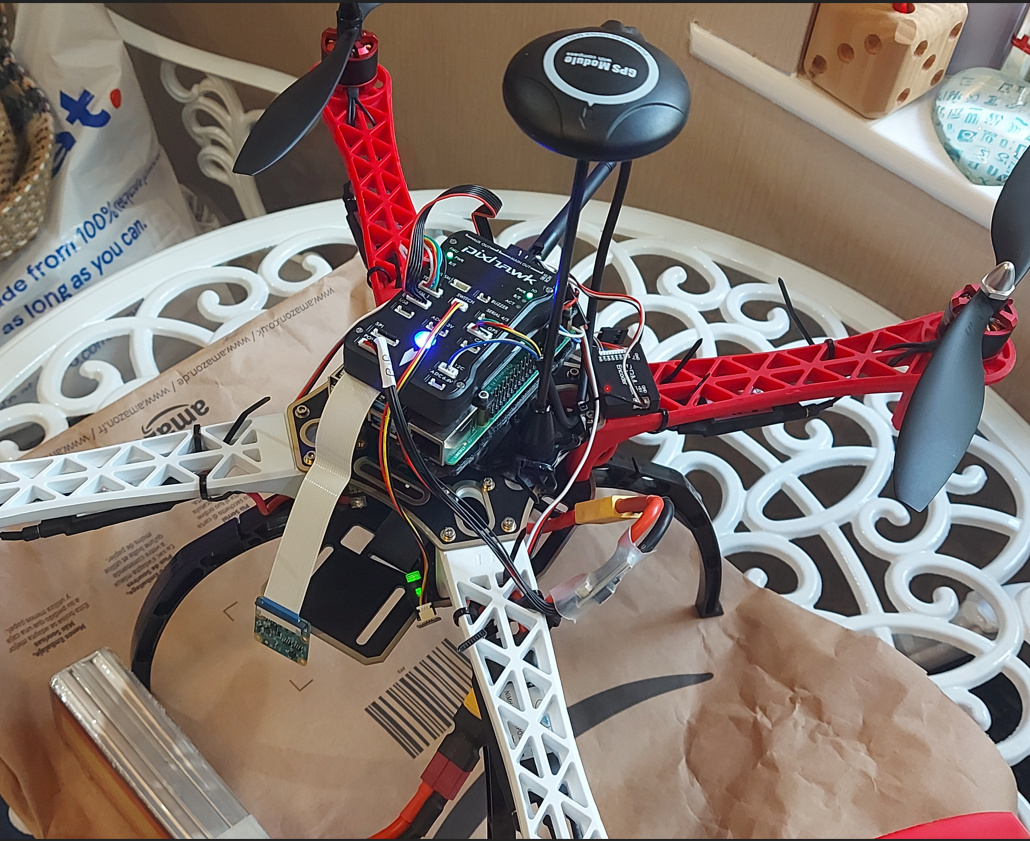
I’m also using SITL, learning the software and testing out scripts there and it will soon come a time when i need the drone to be flyable. At the moment i have never managed to raise the drone off the floor, by Mission planner or RC - both previously i was able to get the Motors spinning but now i can’t do that but Mission Planner does react in the Quick Tab and HUD when i move the drone so there is some good parameters coming through. Thanks