Thank you for replying.
The Original PixHawk that came with the Kit
had an issues when i was connecting / reconnecting the mini usb and resulted in it’s connector breaking and falling inside the unit

I posted a message Pixhawk replacement - Drone Talk - Drone Dojo (dojofordrones.com) asking if anyone knew where in the UK to get a new one, i got one in the end which to me seemed to fit the bill.
This one has this quoted on the side

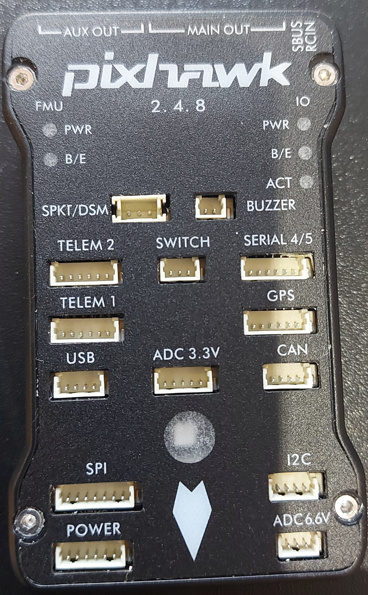
And the Drone currently looks like this
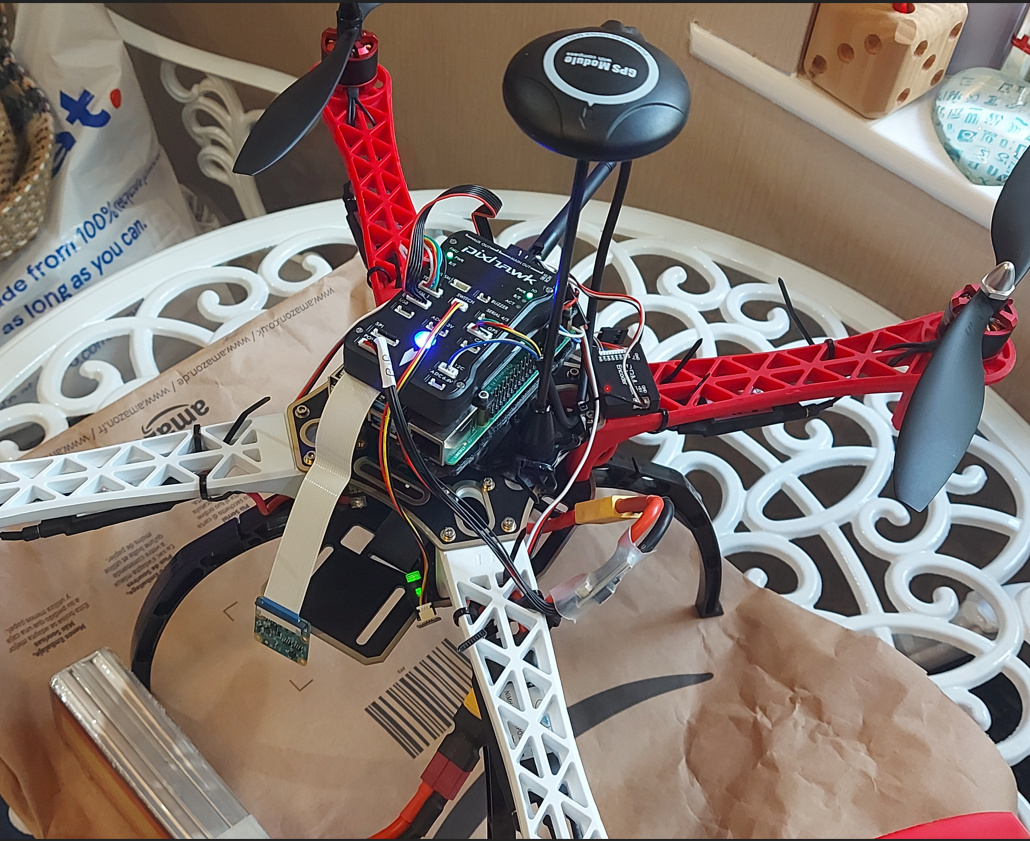
Connecting via Telemetry shows 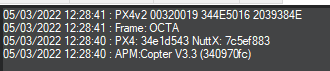
2 days ago i attached the Legs and connected Benewake TF-Luna LiDAR Module Range Finder Sensor Single-Point Micro Ranging Module 5V UART IIC 0.2m~8m Measurement, for Arduino Pixhawk Pedestrian Vehicle Detection : Amazon.co.uk: Business, Industry & Science
I’m working my way through the Precision Landing course, after connecting that to Serial 4/5 following the info Benewake TF02 / TF03 lidar/ TF-Luna — Copter documentation (ardupilot.org) When i connect now, Motor A has stopped spinning but 3 others are fine via Motor Test and the documentation mentions sonarrange status which shows 0 when i check.
At the moment the drone does not have knowledge of the GPS even though it is connected and i have previously done compass calibration. Occasionally out the back when i do this step i see white dots but as i rotate the drone it follows the ‘flow’ of dots but then stops
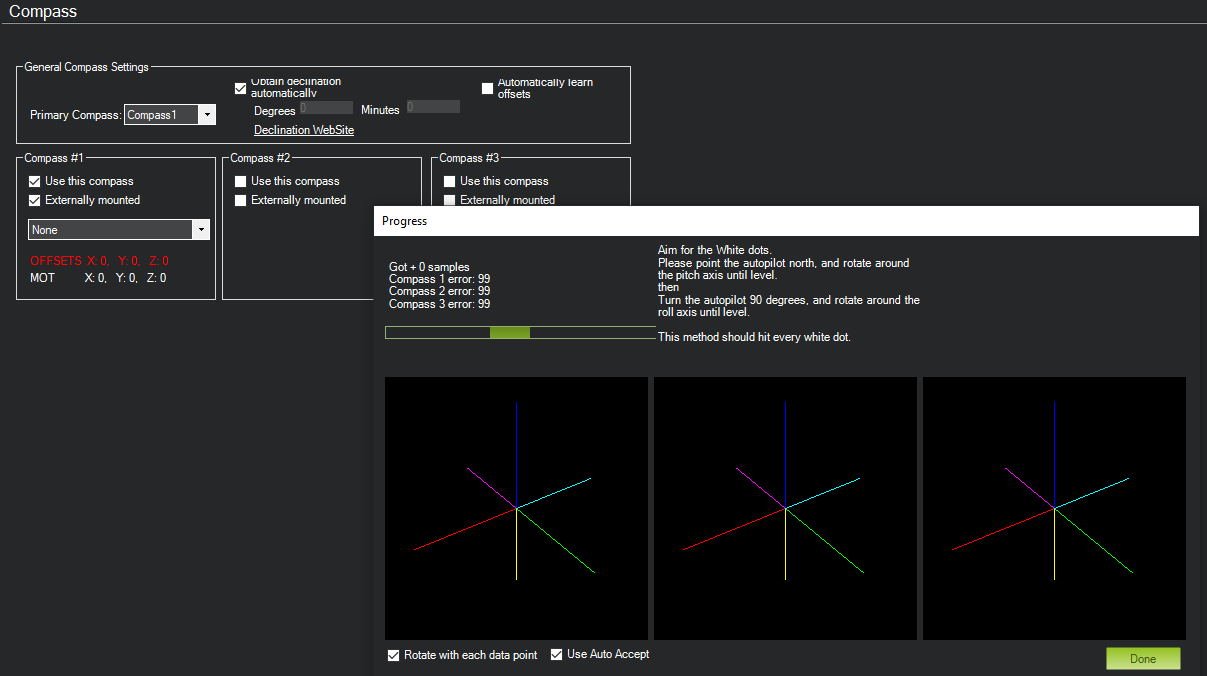
Usually i just see what is above tho out the back, where no white dots appear
I know all the above sounds a lot of issues, i was expecting some problems when i first started this project and i’m still willing to learn to overcome these unforeseen ones. My main goal is programming the drone with Python whereas hardware aspects are of interest too but not my main strength at the moment. Not knowing for example to Smoke Stopper was a temporary thing to use caused me a long delay, still having it connected until Caleb said to remove it via email.
I was thinking about reverting to the original pixhawk but i thought i needed the USB connector for some reason, if i don’t then i could swap it back and see if it plays nicely with the GPS and Lidar module. As for Motor A no longer spinning , not thought about that at the moment. Each time i get something going something else happens.
Thanks for listening ![]()