hi,
Im at the course “connect drone to MP via internet only”
I am able to connect using the MP interphase but unable to do it via scripts.
read an older blog here but could not make it happen.
I also followed the steps in the youtube video “make your own pixhawk rpi dorn in 36 minutes”.
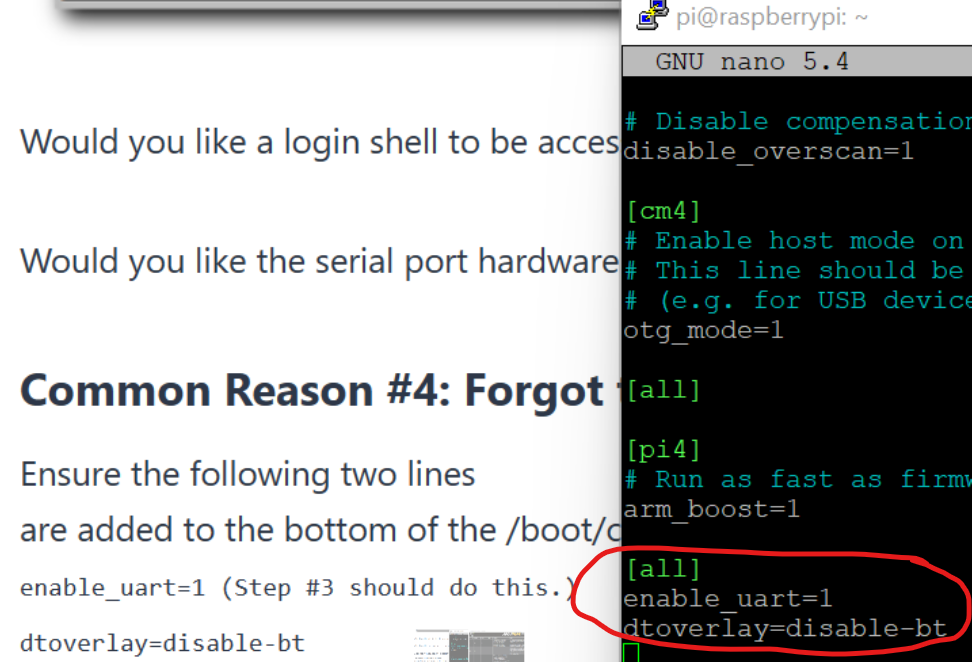
following the steps in the youtube video, I did change the RPI config tool ad also edited the boot/config.txt file.
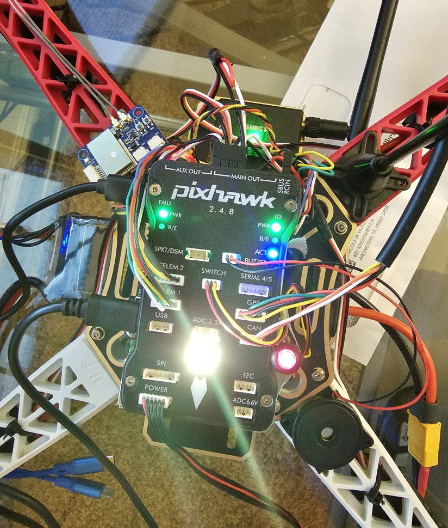
when I connect the rpi to power, the pixhawk does get power too.
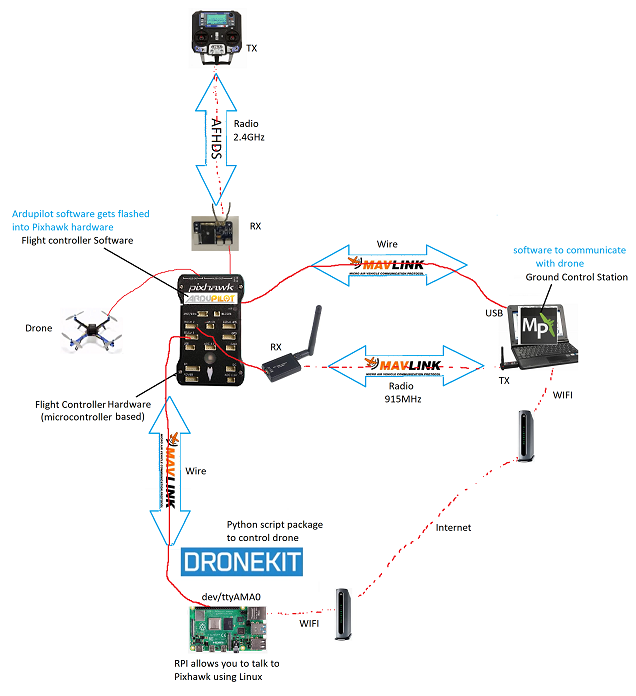
this is what I get with /dev/ttyAMA0 (youtube video)
pi@raspberrypi:~ $ mavproxy.py --master=/dev/ttyAMA0 --baud 57600
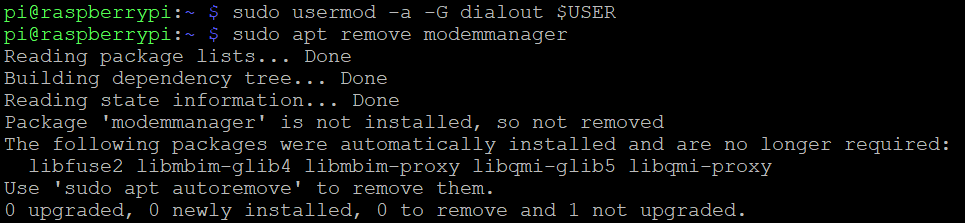
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect /dev/ttyAMA0 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from /dev/ttyAMA0
MAV> Detected vehicle 1:1 on link 0
online system 1
Mode(0)> Mode Mode(0)
fence present
AP: ArduCopter V4.3.3 (34e8e02c)
AP: ChibiOS: 66e5de0d
AP: Pixhawk1 00410041 30365115 31313731
AP: RCOut: PWM:1-14
AP: IMU0: fast sampling enabled 8.0kHz/1.0kHz
AP: Frame: UNSUPPORTED
Received 936 parameters (ftp)
Saved 936 parameters to mav.parm
AP: GPS Glitch or Compass error
AP: EKF variance
AP: PreArm: Motors: Check frame class and type
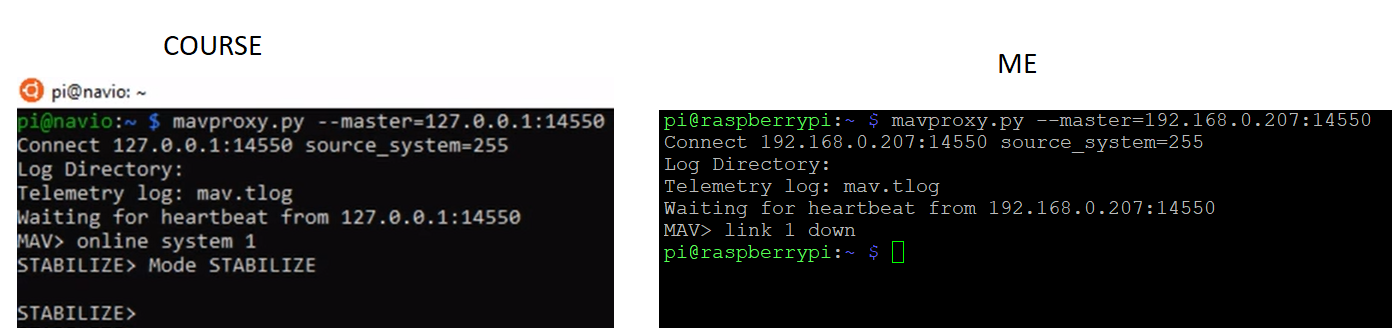
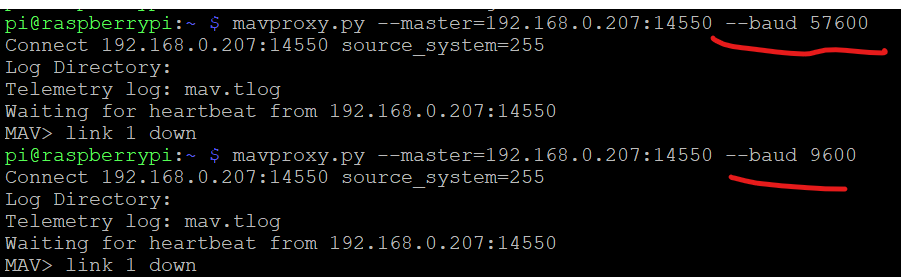
this is what I get with IP (dojo course)
pi@raspberrypi:~ $ mavproxy.py --master=192.168.0.207:14550
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect 192.168.0.207:14550 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from 192.168.0.207:14550
MAV> link 1 down
for this modemmanager error I did disable it, same error
used:
sudo systemctl disable ModemManager.service
Jax, thank you for the reply,
I wonder if I did miss something?
was not able to find the course mentioning to remove modemmanager
course “how to build rpi > initial setup of drone > step 7 connecto drone to MP via Internet only”
serial interface
already enabled serial port in RPI as step 3.
Would you like a login shell to be accessible over serial? NO
Would you like the serial port hardware to be enabled? YES
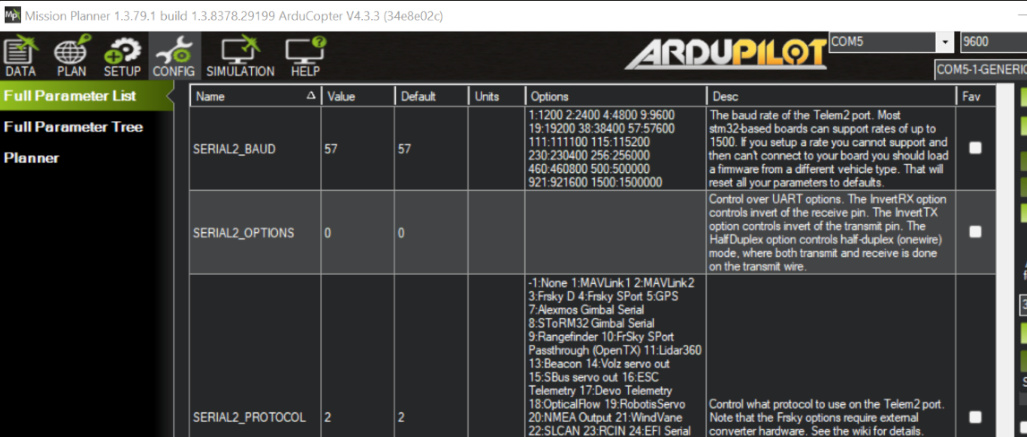
bt overlay
already confirmed configuration in boot config file
COM port,
not applicable here since we are using IP?
couple notes:
-If I power the RPI, the pixhawk does power,
-Using RPI imager,
-My mission planner arducopter is newer compared to the one shown in the video.
-I am able to connect the Mission planner using USB link, if I tilt the drone, the horizon moves and I can see the map showing my house location.
-I have been unable to power the motors with the RC controller, the manual calibration didn’t work, the calibration through mission planner I think didn’t work.
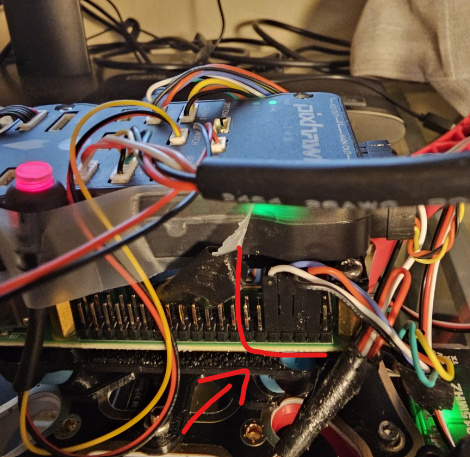
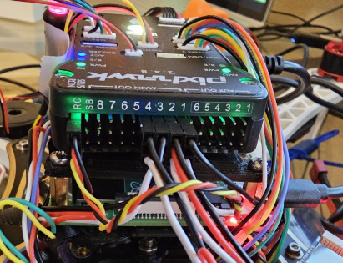
-all other pins/wires in pixhawk or RPI have been disconnected/connected to make sure no lose cables
Also sounds like you need to get the receiver sorted out with the transmitter. Could be a problem how the transmitter is configured or/and how the receiver is wired
My video shows that the pixhawk does connect to MP via USB and not via Internet. Motor Test in MP only makes music in pixhawk but doesnt spin the motors. the battery is connected and has full charge. Confirmed that the motors are receiving charge and are even pulsating a little bit. Checked that the screws are not over-tight, watch this second youtube video:
checked all the cables to pixhawk, so far I believe the pixhawk hates me.
Regarding motors:
Are you able to connect to MP via Telemetry?
Yes, per your recommendation, I read the MP messages tab where it said I didnt have a frame configured, solution:
MP > setup > hardware > frame type, selected quad
A following error didnt allow to arm because it said I was missing a compass,so I just removed it:
MP > setup > hardware > compass > remove missing
then start the calibration with the steps shown in the course
Regarding internet connection to MP:
I was able to then connect using /dev/ttyAMA0.
the course video how to build RPI drone > initial setup > connect drone to MP via internet
shows the steps on connecting using IP, is that only for Navio?
all that said, I thank you both for helping me move forward, I was able to make it work!
a recommendation I would give other folks is that when hitting roadbloacks during the course, watch the following videos because issues can be solved by the information in videos you haven’t watch yet.
 …
…