hi,
Im stuck on an issue I have read multiple articles about.
While running the autonomous mission takeoff and land from the drone dojo github
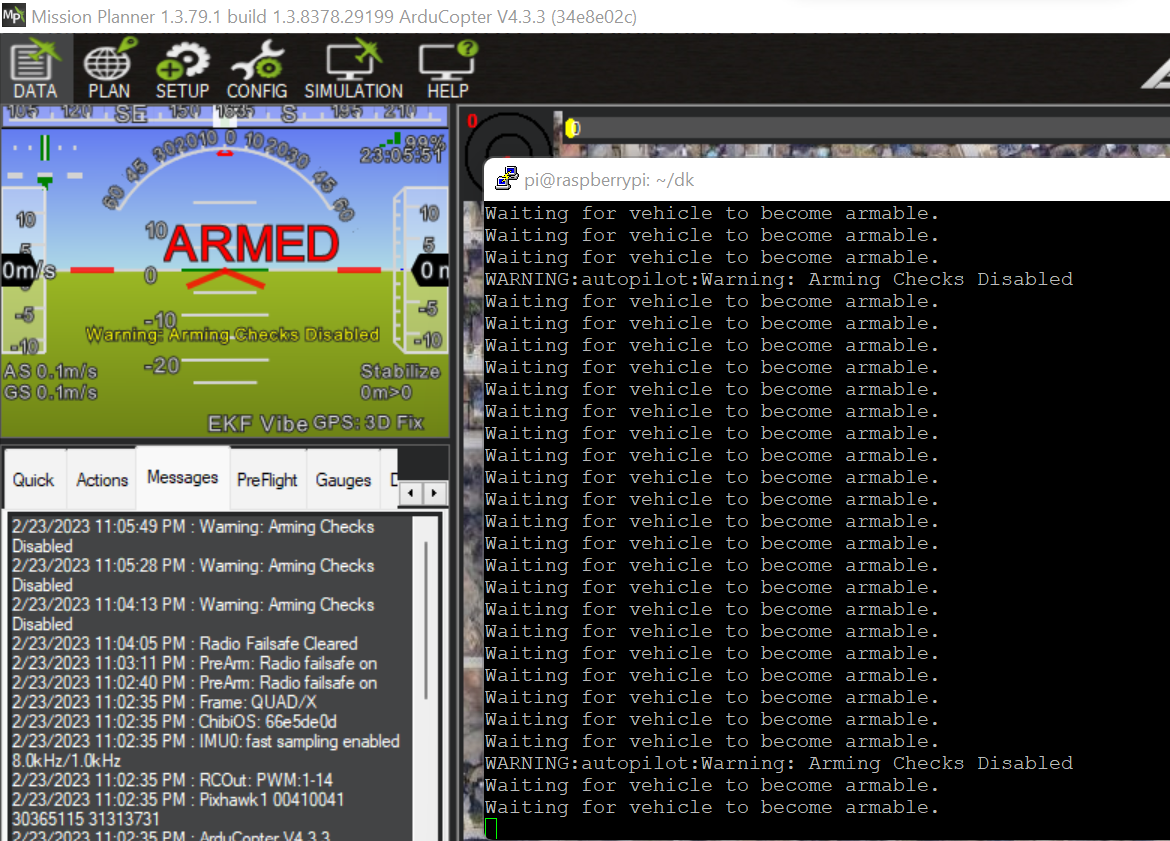
I am stuck in the loop where the script cannot detect I am armed.
While in fact, I am very much armed, to the point that I can even spin the motors with my RC controller.
If I start the motors with RC, script would still say “waiting for vehicle to become armable”.
MP message section doesn’t report any issues.
Im using the Pixhawk drone version.
Some attempts made:
-The manualArm is set to False, tried True as well.
-changed Mission planner Arming_Check to 0.
-tested the older dronekit script from the video, same result.
-tried turn off, turn on the RC transmitter
-armed the drone using the RC transmitter
-checked my script identation
-let the script run for more than 10 minutes
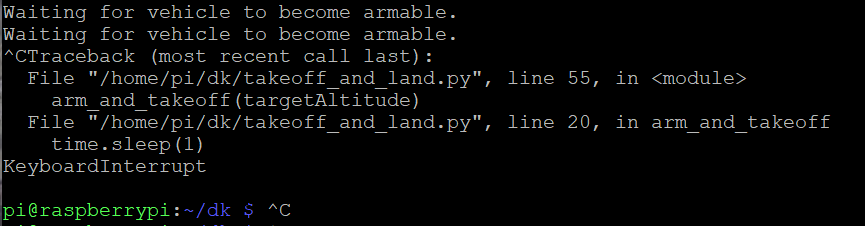
when I break the script, it shows it hangs here:
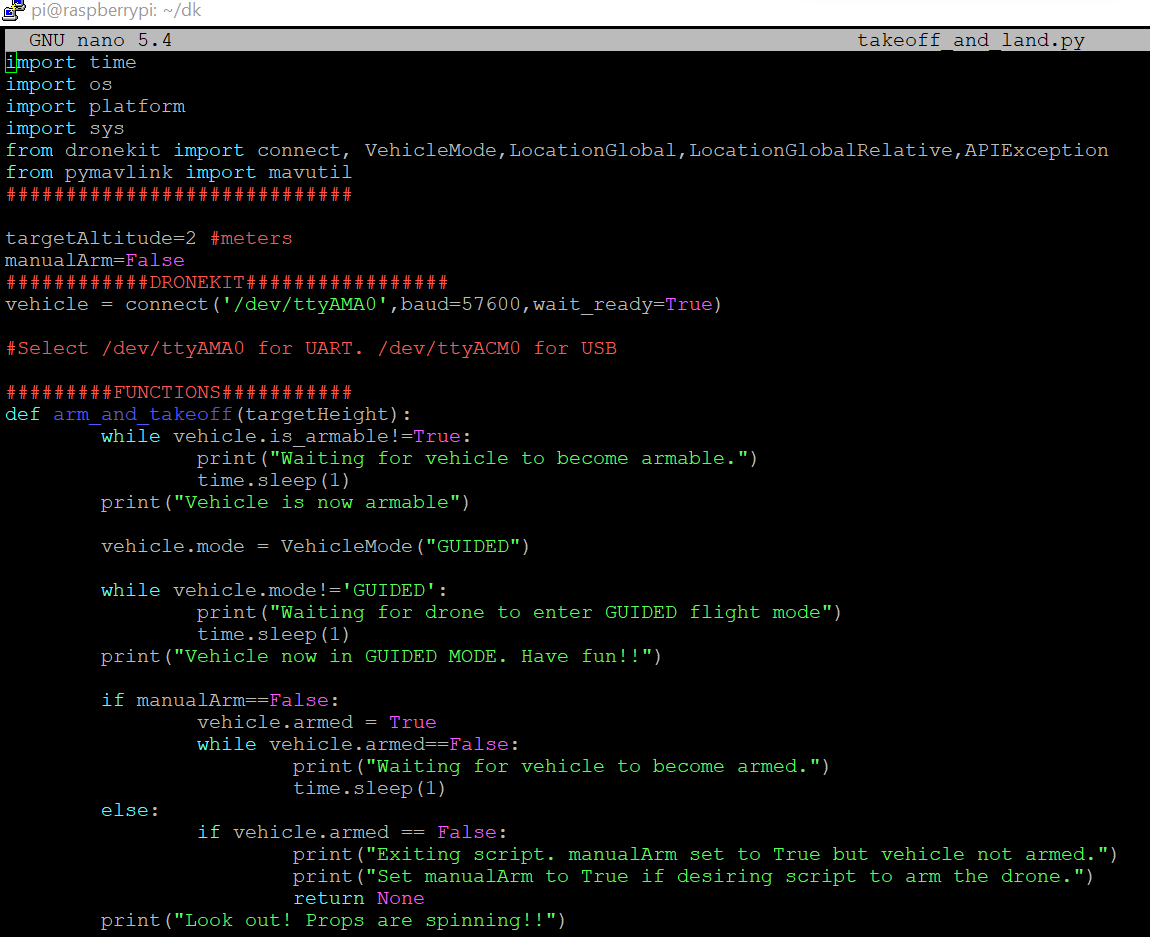
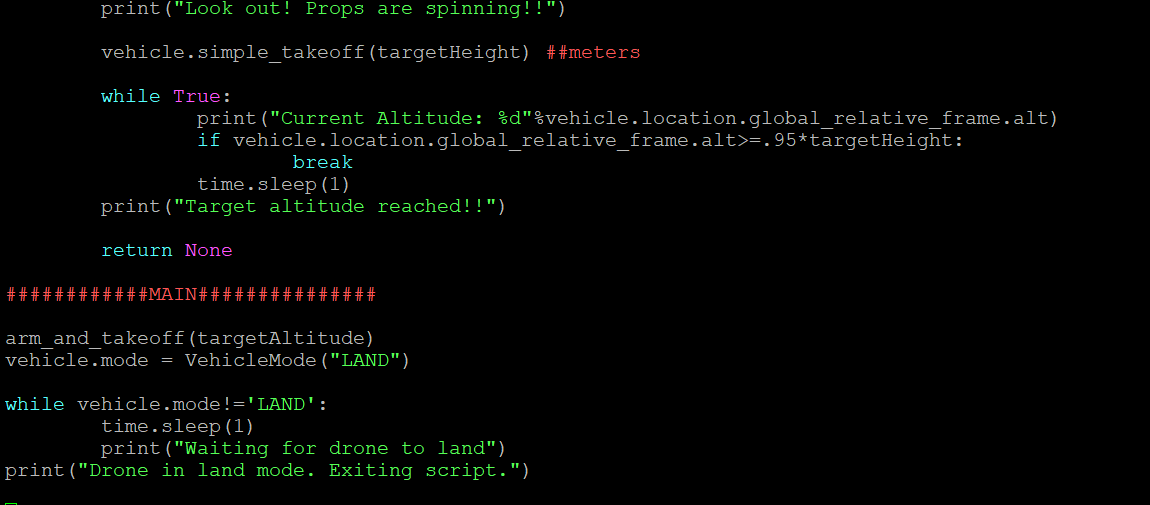
Full code:
(copy pasting in picture to show identation)