In the course “How to Build a Raspberry Pi Drone,” the Manually Flying Your Drone section in a video called Flying in ALT-HOLD Mode. I can’t hold my drone in the AtlHold position after turning the knob to the right (see picture below). It’s very hard to control the drone with the RC after you give it throttle, and the drone keeps moving forward. I followed the Mission Planner settings instructions and could not make it work. Any help would be greatly appreciated. See the pictures below for reference.
Sounds like the flight controller AHRS sensors need to be re-calibrated. Ensure the FC is installed properly level on the frame. Ensure you used the correct FW frame type.
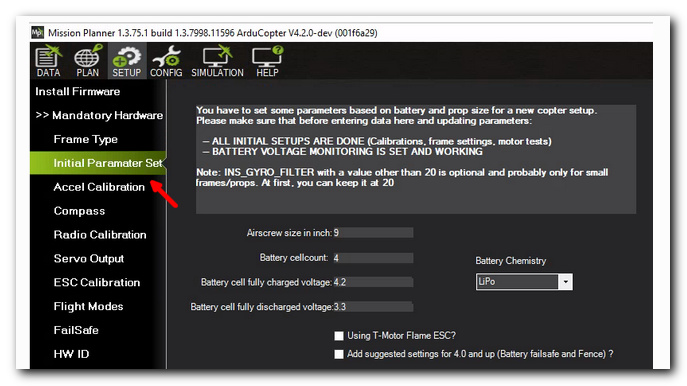
If there is a lot of motor vibration it also could make the drone unmanageable. Make sure the motors and props have been installed securely. Use the MP Initial Setup for the PIDS and tuning.