Hi …
Does anyone have any troubleshooting steps for ensuring servo actuation during delivery?
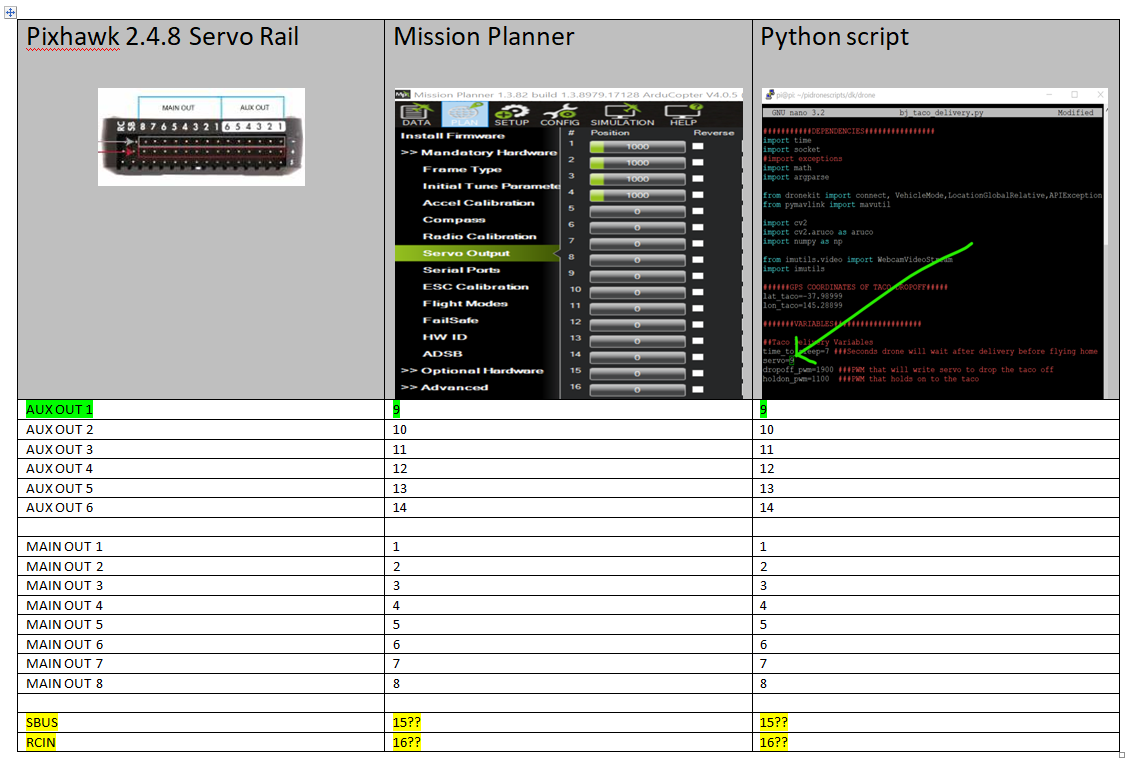
The servo and or control_servo.py work fine now that I’m using ‘Main Out 8’ rather than’Aux Out 1’, on the Pixhawk rail …
Hi …
Does anyone have any troubleshooting steps for ensuring servo actuation during delivery?
The servo and or control_servo.py work fine now that I’m using ‘Main Out 8’ rather than’Aux Out 1’, on the Pixhawk rail …
Hi there,
If the python-dronekit control works in the control_servo.py script, but not your taco delivery script, this seems to be an issue with your delivery script and not the fundamental pipeline of python->dronekit->ardupilot chain.
Perhaps you need to add/make longer a time.sleep at the time of your servo actuation?