I am not an expert at analysis either, but here are a few possible observations.
I see your first flight landed due to a power failsafe, then replaced with a fresh battery.
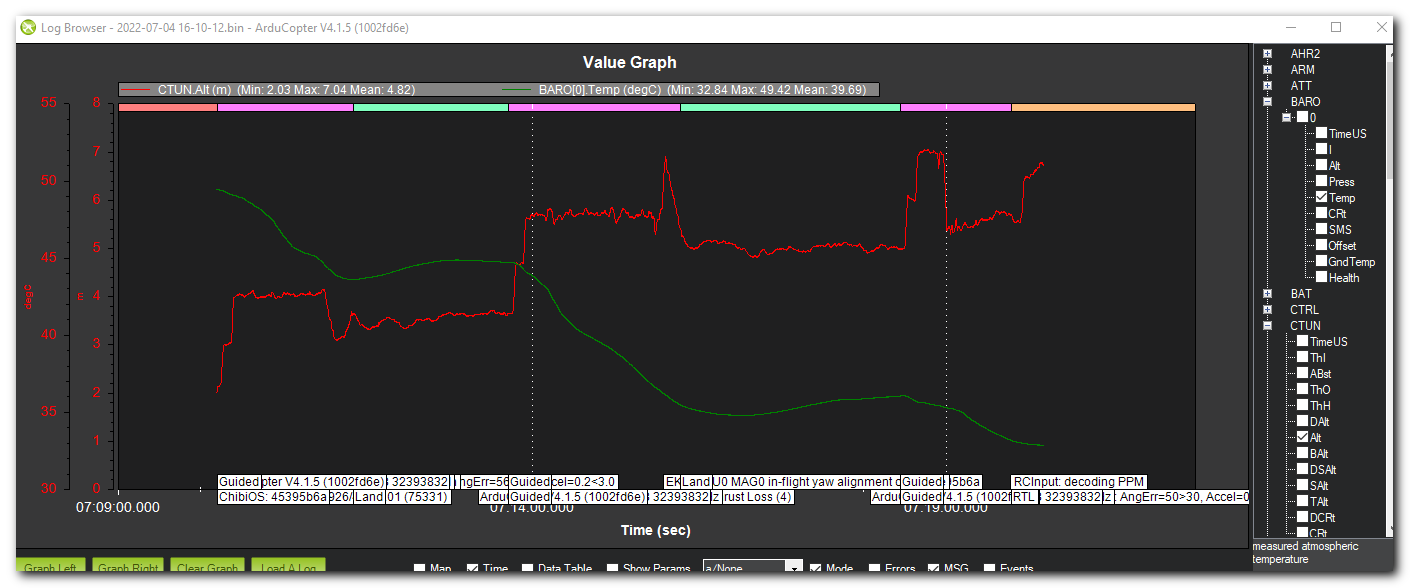
The baro temp was steadily dropping with each flight as the air flow cooled it, causing an estimated baro alt change of 2m. But this would not cause a sudden critical situation.
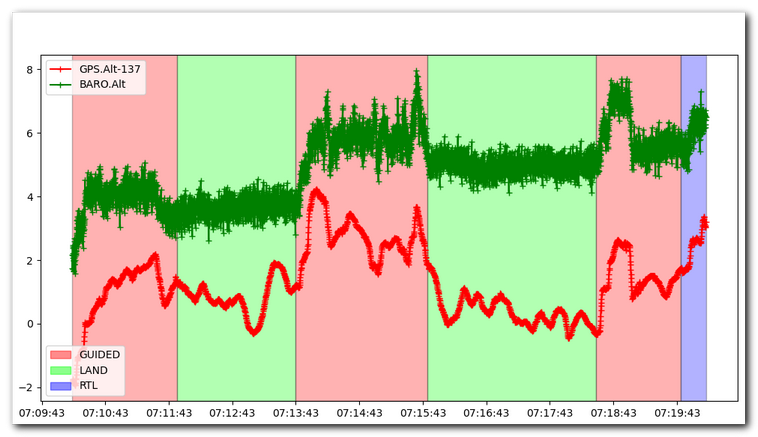
Here is the GPS.Alt (adjusted) vs BARO.Alt
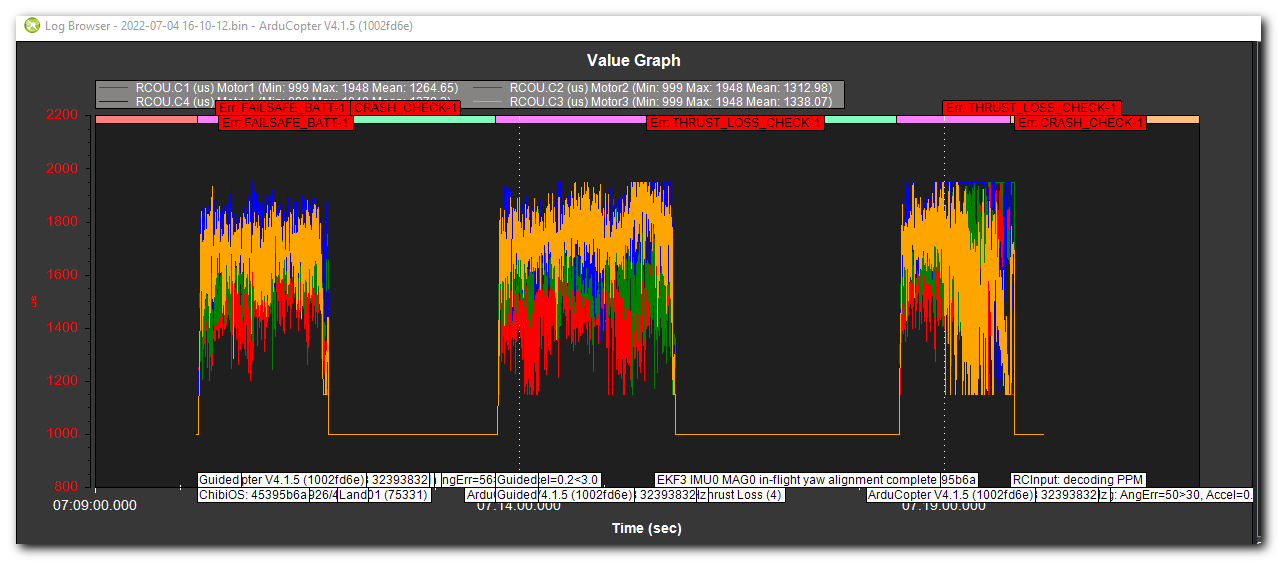
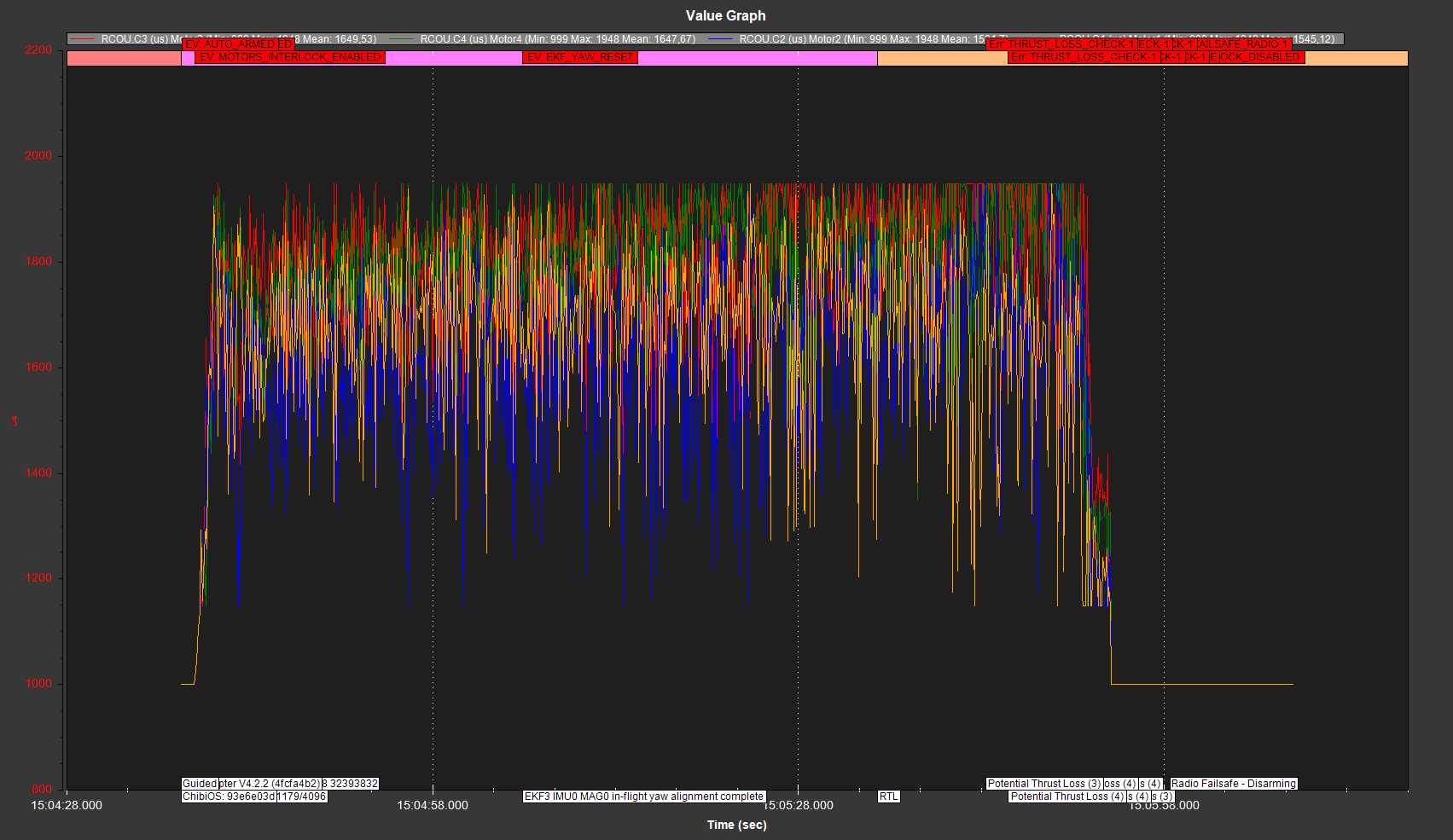
Although there are no apparent vibration issues, I think I see some discord between one or more of the motors, particularly C3 (yellow). How was this drone tuned? Also, is there a possible weight imbalance or/and poor thrust/weight? There should be sufficient margin in the design so you are not always near max throttle.
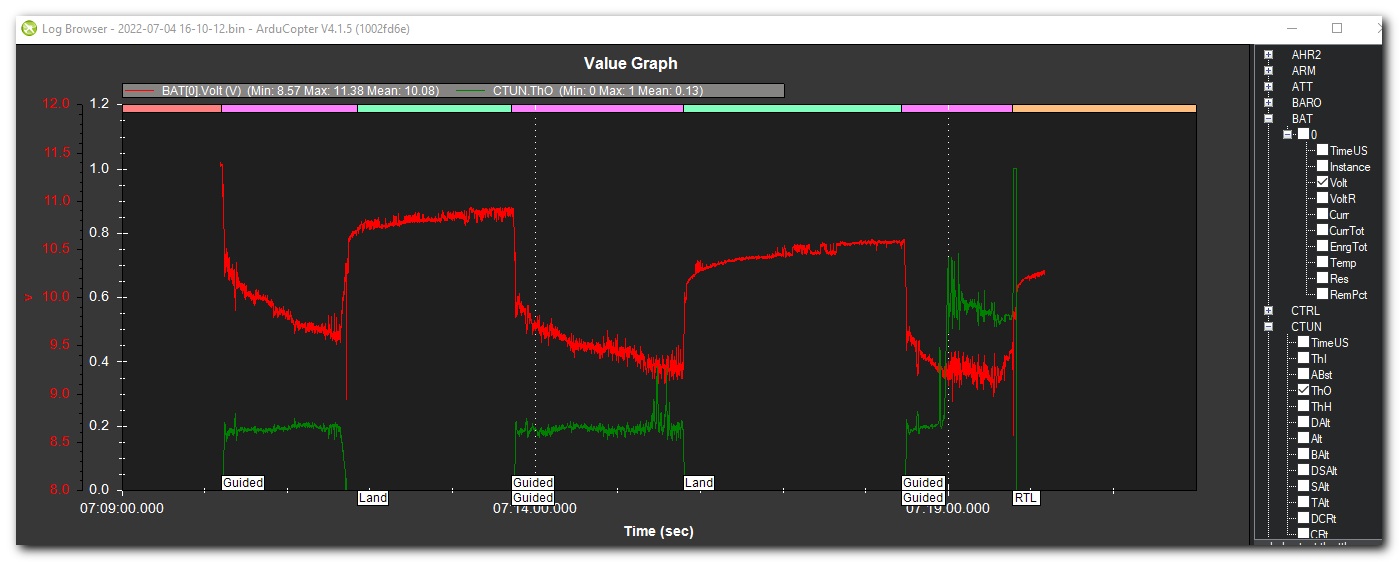
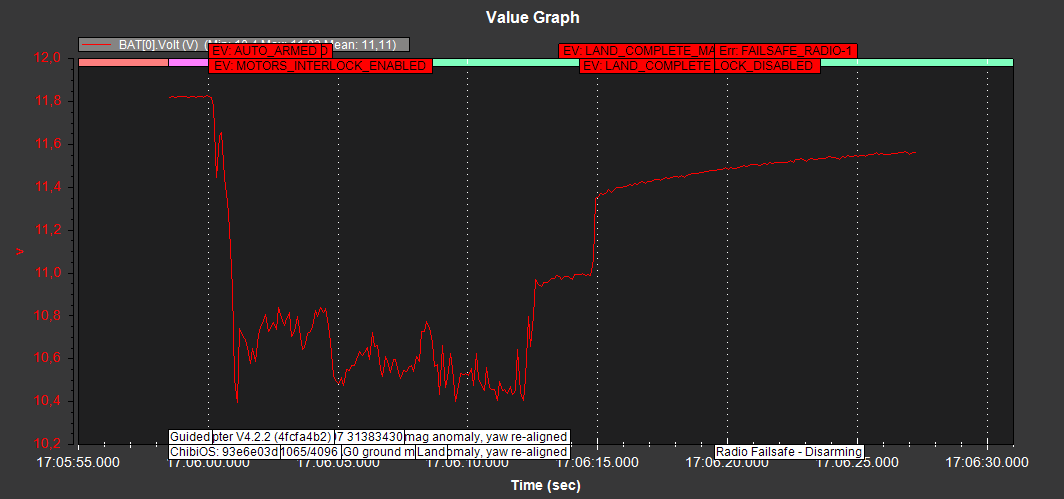
A more important issue however, is the significant draw-down in power with throttling up, ie, ‘voltage sag’.
This would account for the drone landing because it could not sustain thrust, but still had enough power to keep the motors going on the ground. Are these old batteries? Battery capacity and ability to provide the power demands needed can change with time and multiple recharging even if the voltage levels appear high. I am not a battery expert, but I think by measuring battery internal resistance would give an indication as to the health of a battery. An improper C rating match can also create issues.
The Potential Thrust Loss could be due to when it was leashed, but I don’t think it was the problem. There was also a moderate change in magnetic field of 25% that might warrant checking if your compass needs re-calibration in the field.
So I would try:
- Making sure your drone is properly balanced, not putting excessive demands on one motor.
- Not overweighted and good thrust/weight.
- Tuning to optimize PID and stability. Use the Mission Planner tuning tools, including autotune.
- Using new fully charged batteries and see if it makes a difference.
- Compass calibration in the field.
There are a number of discussions about this at https://discuss.ardupilot.org/ where you can get more expert opinions.
Also check out articles on battery maintenance and health.
https://www.thedronegirl.com/2020/05/24/lipo-batteries-last/
https://diydrones.com/forum/topics/large-voltage-drop-after-takeoff