Hi!
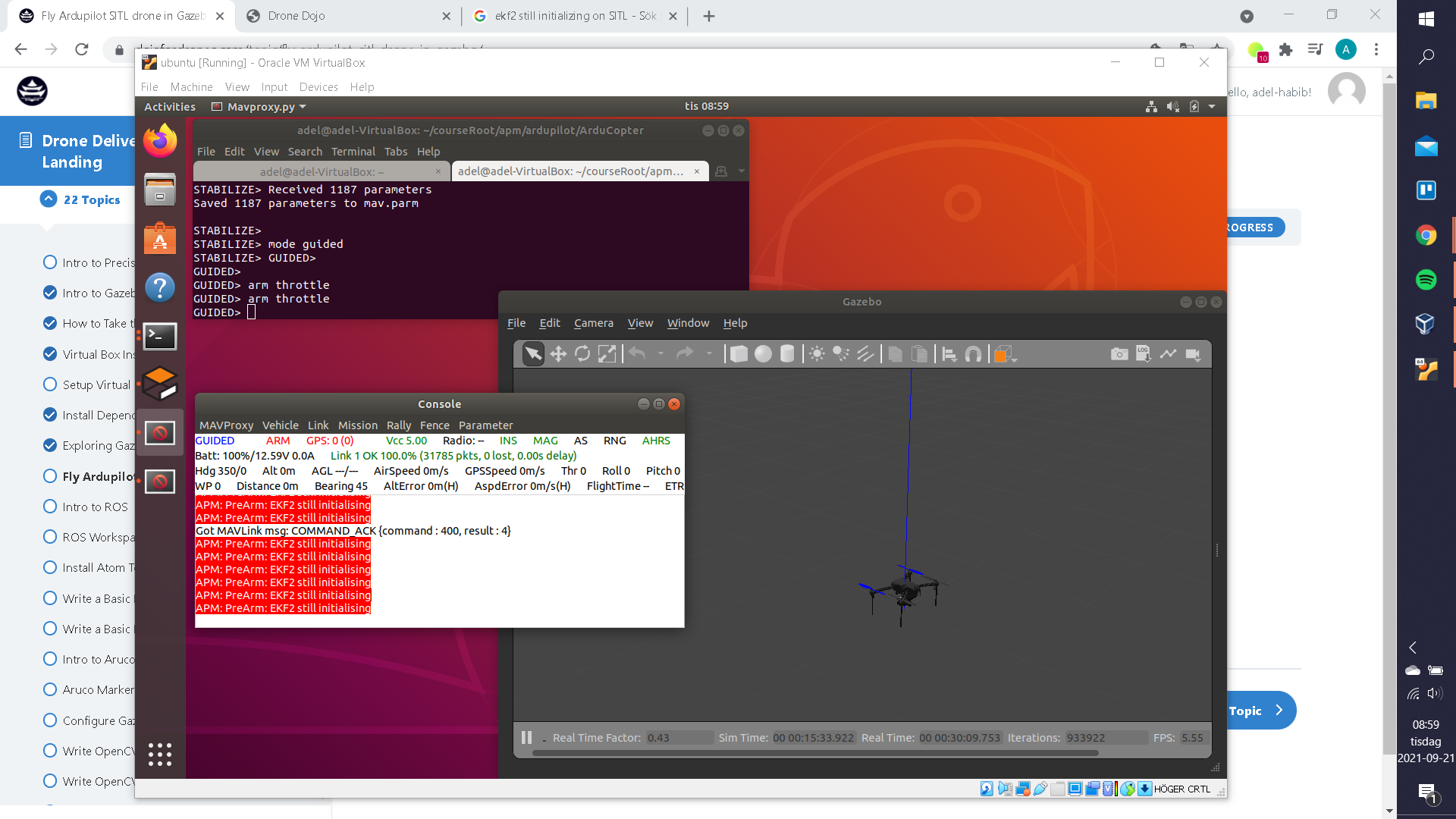
Could not arm the sitl drone i gazebo because the ekf2 is still initilizing. Any idea how to solve this? I have also tried to restart ubuntu.
Hi!
Could not arm the sitl drone i gazebo because the ekf2 is still initilizing. Any idea how to solve this? I have also tried to restart ubuntu.
It can take the EKF a long time to initialize, even on the SITL drone. Try booting up the drone and letting like 5 minutes pass. It shouldn’t take this long but it let you see if the issue is just not waiting long enough.
is the problem solved, yet? I have the same problem, too
problem resolved after reinstalling ArduCopter.!
I recently had the same issue and as Caleb says it can take time while it is trying to get a GPS lock.
Since I use the SITL on VirtualBox I create Snapshots when I have a good state. My solution was to Restore a previous good machine state.