So today I was supposed to fly my Pixhawk drone after building one from the instructions in How to Build a Raspberry Pi Drone. I was on stabilize mode, and as soon as I gave my drone a bit of gas (raised the throttle stick by just a little) my drone did a backflip, that is the front of the drone went up but the back didn’t as much. Does anyone know the reason? Any tips? I am pretty sure my motors are fine, it’s probably something in the pitch of the drone.
That is a typical sign of an incorrect motor spin direction or/and prop placement.
It can also result from choosing the incorrect frame type or inadequate calibrations during setup.
But you say the motors are fine meaning you have confirmed this? Perhaps also confirm there isn’t any fine debris in the rear motors, or recalibrate the escs. Another possibility is the vehicle center of mass is rearward. Any of the above could create a differential moment of thrust, ie, a thrust imbalance.
Might not be interesting for the OP anymore but it caused my backflip problems and is only glanced over in the course videos. So just for reference…
When you work with a newer Mission Planner build you will have the following frame type selection dialog.
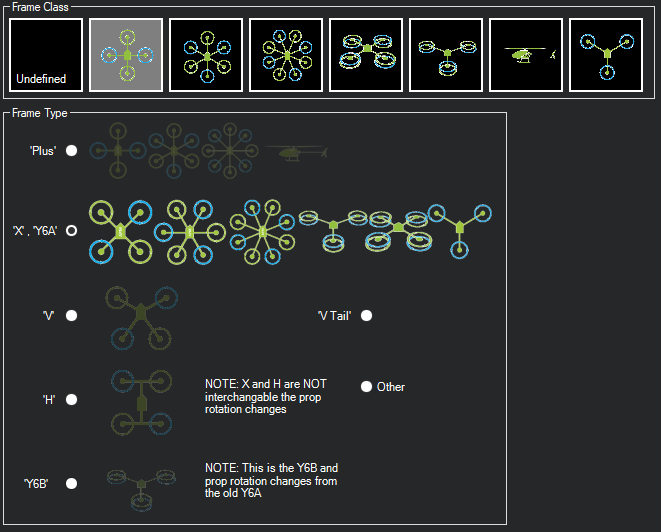
Under Frame class, you might be tempted to select the fourth from the right as it looks the most like your drone. However, this build has two motors on each arm and 8 altogether. The right choice is the second from the left. It doesn’t look anything like your build but it has the right number of motors, which is seemingly important for the Frame class.