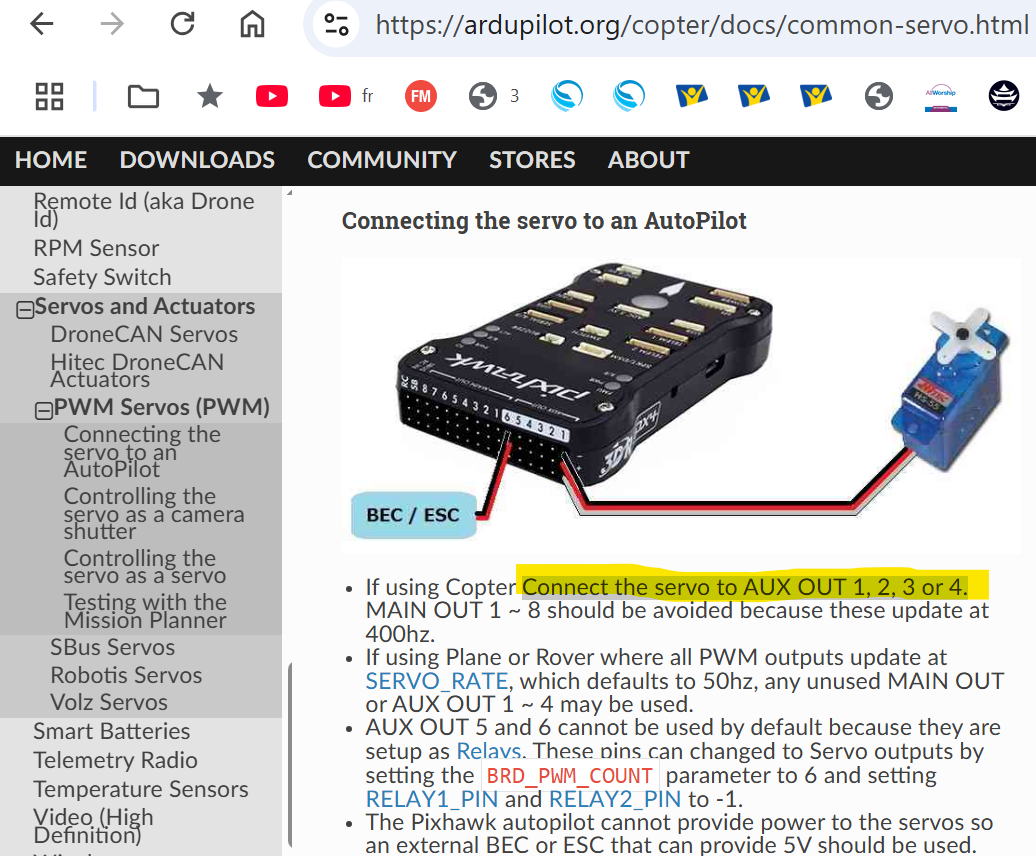
Am just checking if anyone can confirm that the attached ArduPilot advice is suitable for our Precision Landing application?
I ask because the course tutorial uses a Navio, rather than a Pixhawk …
Am just checking if anyone can confirm that the attached ArduPilot advice is suitable for our Precision Landing application?
I ask because the course tutorial uses a Navio, rather than a Pixhawk …
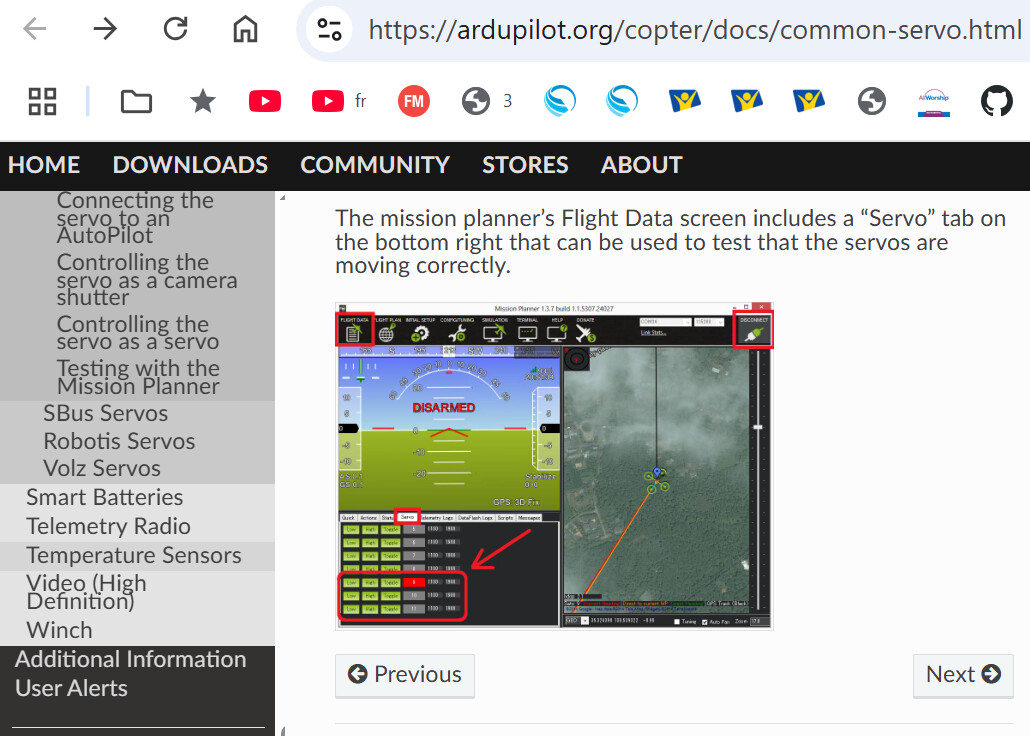
My servo toggles as required when using Mission Planner as per ArduPilot’s attached instruction, but when I follow the Drone Dojo tutorial, there’s an attempted MAVLink connection (attached), but no servo actuation.
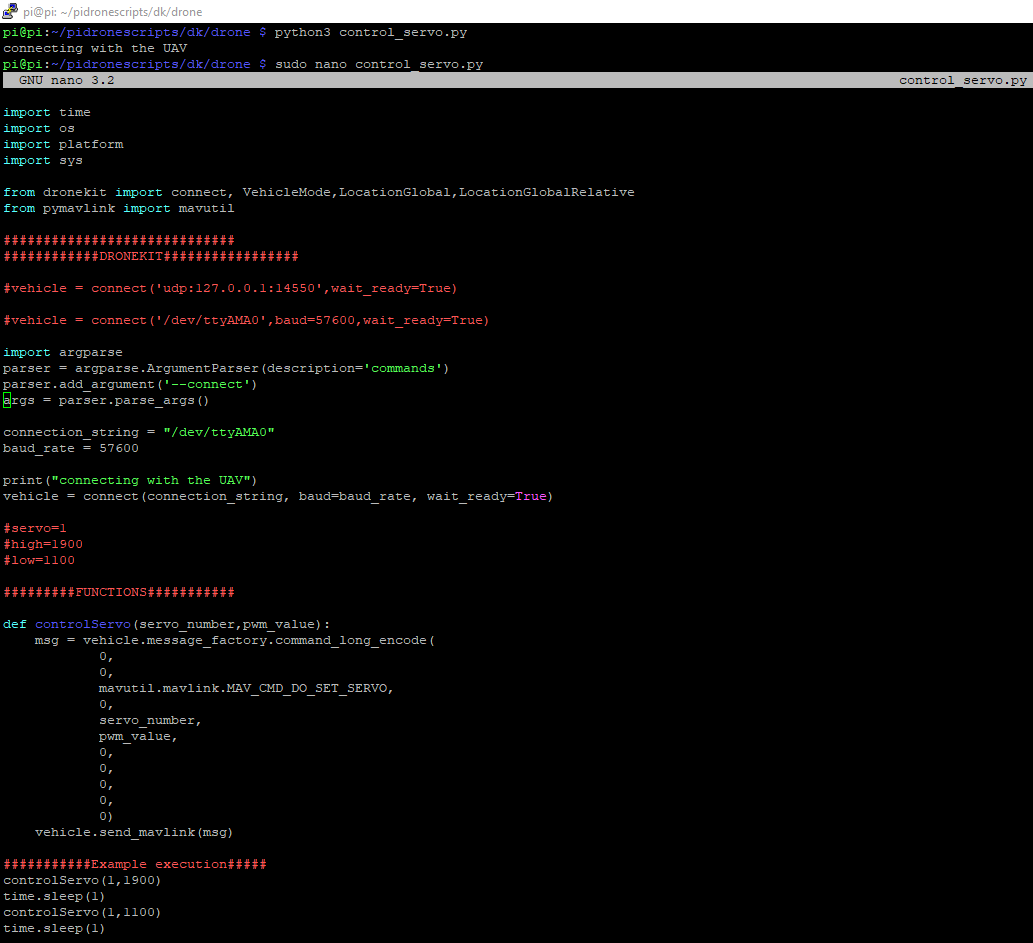
Can someone please see if my attached control_servo script contains an error?
By the way, when I type ‘python control-servo.py’ (rather than ‘python3 control-servo.py’), there’s the usual incompatability issues …
Use controlServo(9…etc)
The physical mapping and software mapping is:
MAIN (motors) PWM1-8 … AUX9-14
SERVO1_FUNCTION … SERVO14_FUNCTION << used in Mission Planner
Servo 8 (Main Out) worked for me, only after I applied ‘RCPassThru’ to it in Mission Planner -

Servo 9 (Aux Out) didn’t work for me unfortunatey …