I received an FS-i6X Transmitter and X6B Receiver when I purchased the course. The X6B has really no useful documentation or video on how to configure with a Pixhawk. I was expecting something like an IA6B receiver which is depicted in the course videos, which is very straightforward.
In my case, the FS-i6X Transmitter has an RX setup Output mode for Output and Serial options e.g. PWM and PMM, I-Bus, and S-Bus, respectively. There is also an RX setup I-Bus setup option. Not sure what that is for or if needed???
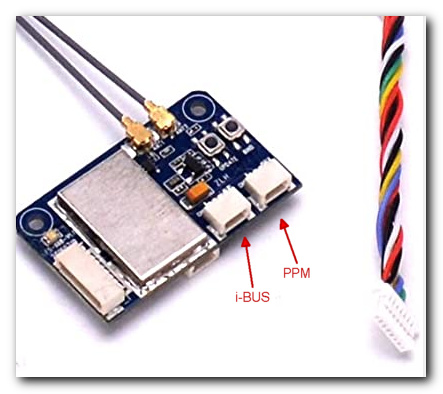
Also, which port on the X6b receiver should be used depends on the options selected in the transmitter, ostensibly, …S-Bus, I-Bus, PWM, and PPM. But which ones should I use???
I tried many of the options but couldn’t get it to work. Has anyone gotten this to work???
The receiver is for FPV flyers, that was my initial thought. Thanks for confirming. I will be going with a PPM encoder connection instead. Thanks for the info.
Follow-up. I decided NOT to go with the PPM encoder solution detailed in the course. Instead, I decided to go with a Flsky ia10b receiver, which doesn’t need a separate PPM encoder board. I set the FS-I6X transmitter RX option to PPM and ibus then plugged a three-wire connector into the servo bank on the receiver and the other end to the RC port on the Pixhawk. Everything worked as expected. The additional benefit to this configuration is the ia10b receiver has a greater range, 500-600 meters, than the X6B, 300-400 meters, receiver.