Any ideas on going about this problem? I’m able to see the GPS working, I did the radio calibration, and compass calibration. I cannot seem to get the ESC calibration to work. When I do a motor test, I hear the music/beeps, but there is no movement from the motors. I am getting the prearm error: Check MOT_PWM_MIN/MAX.
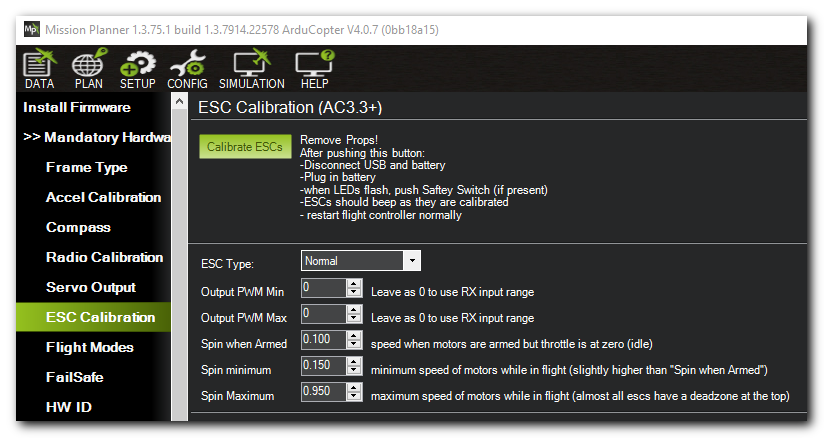
I attempted the all in one calibration without MP and then I attempted calibrating in MP when that didn’t work, but I am not getting to the part where the throttle affects the sound for the ESCs to be calibrated. Only the initial start up sound happens, and then the lights on the pixhawk blink yellow twice (fail pre arm check). Should I reinstall 1.3.75 Mission Planner and try to re-flash ardupilot to the Pixhawk.
With my setup, I still have the red power wires attached to each ESC, and they are each plugged into slots (4, 3, 2, 1) of the Main Out of the Pixhawk. The receiver is also connected to the Pixhawk.
The microcontroller is NOT connected to the pixhawk.
GPS is connected to the Pixhawk through GPS and I2C (compass wasn’t showing up when connected to CAN?).
Receiver and transmitter are bound. I am connected the battery to the power module and the to the power distribution board. Off of the power module, the pins are connected to the pixhawk power pins.
The buzzer and switch are also connected to the pixhawk. How can I test that my ESC’s are not bad? Do I complete the GPS/compass and transmitter calibrations before or after calibrating the motors? ESCs/motors do not stop beeping once the battery to the power distribution board is connected, but from what I have seen, this is normal until the ESCs are calibrated?
Remove any esc red wires to the fc output slots.
Only one is needed when you want to power the rail, eg, as a backup to the fc power source.
Try again and see what happens.
Sounds are normal for these escs before calibration.
Btw, the RPi is a computer, not microcontroller.