Hi,
I am a complete beginner and this is my first time building a drone by myself using the Drone Dojo. However, i have been stuck on the calibrating ESCs step for several days now. I have read all the other topics and questions posted here but none have helped me so far.
I have the following:
SIMONK30A NIMH: 5-12S LiPO: 2-4S ESCs
X6B Receiver
FS-i6X Transmitter
PixHAWK 2.4.8
Following the Drone Building Tutorial, i can do the following with the same beeps heard as in the video:
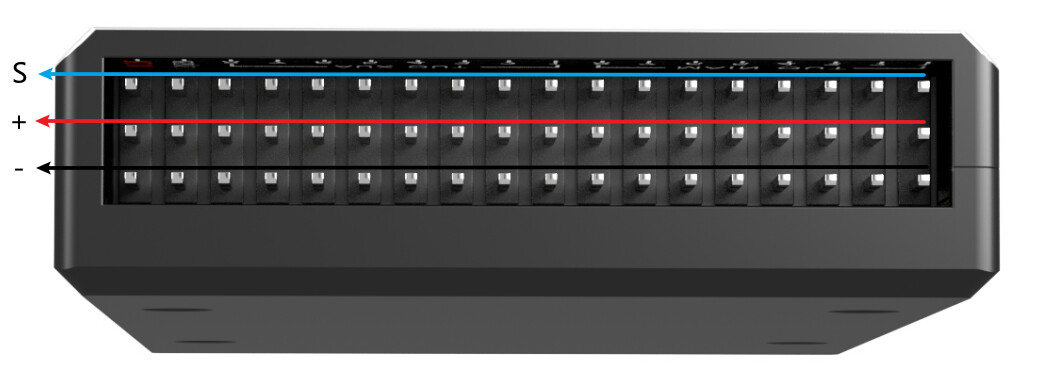
After binding the transmitter with the receiver with the wire going to PPM port on the X6B and the other end of it going to RC on the PixHAWK i do the following:
- I turn on the FS-i6X and turn the throttle all the way up
- I plug in the LiPo battery to the drone and press and hold the safety switch until its solid blue
- I disconnect the LiPo Battery
- I reconnect the LiPo Battery and press and hold the safety switch until its solid blue and i hear a long beep as in the video.
- Then i move the transmitter throttle down as instructed in the video and i am supposed to hear a tone, WHICH I DO NOT.
- Hence at this point moving the throttle up etc does nothing to the motor and nothing spins.
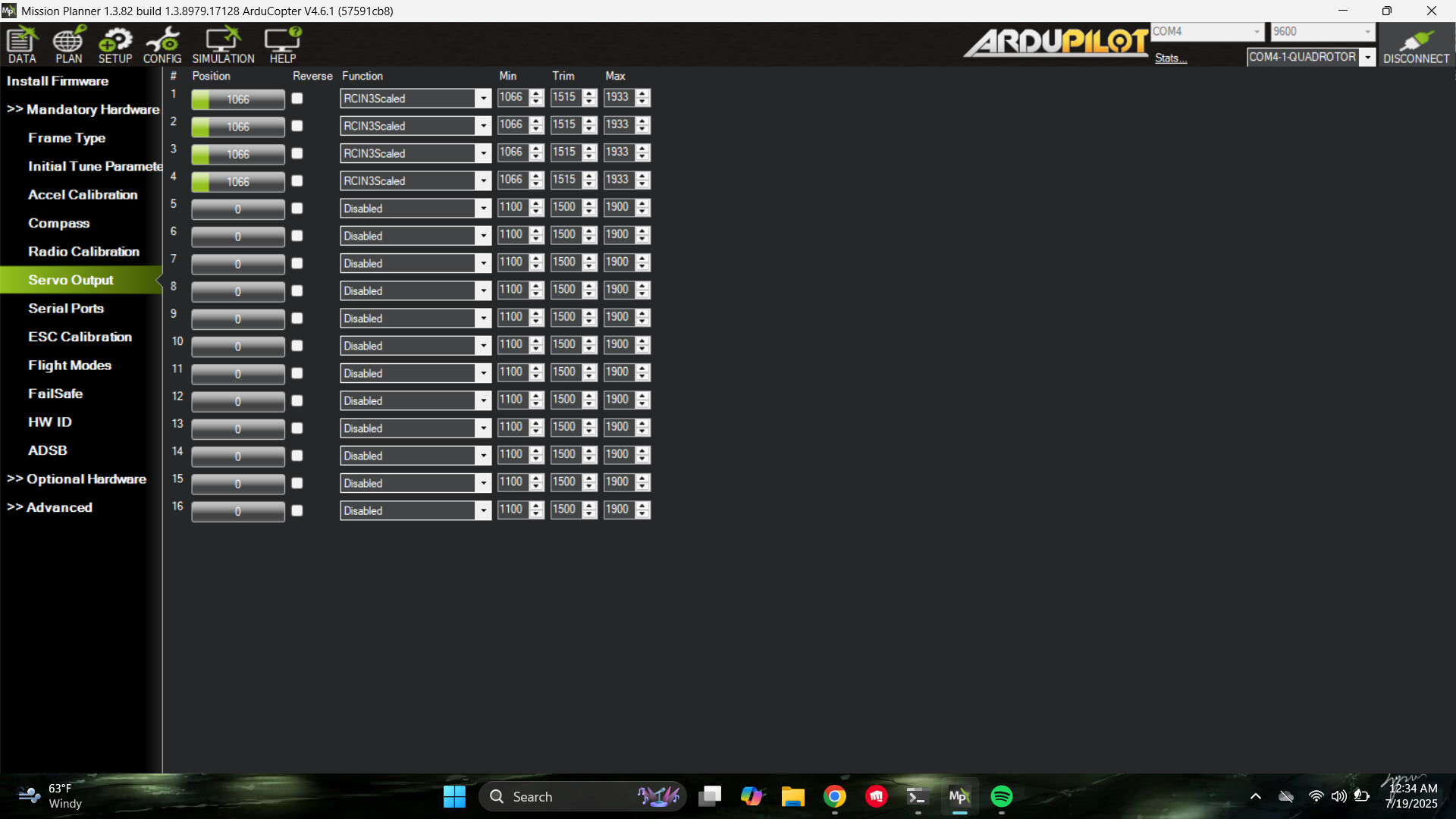
I face the exact same when i use Mission Planner to do the ESC calibration.
I have already flashed the latest firmware to the PixHawk using Mission Planner.
I have tried to do the ESC calibration with the red UBEC wire in all four ESC and also tried it with the red UBEC wire in only 1 ESC and removed from the other 3. I have not been successful.
Can someone please assist me as i feel like i have done the calibration a 1000 times to no avail.
I am attaching a video below that show the situation i am facing.
 . I cant seem to find videos online that explain the correct setup for the FS-i6x transmitter with the X6B Receiver. Can you kindly assist in telling me what settings i should be setting on the transmitter and which port should i use on the X6B (PPM or i-BUS)?
. I cant seem to find videos online that explain the correct setup for the FS-i6x transmitter with the X6B Receiver. Can you kindly assist in telling me what settings i should be setting on the transmitter and which port should i use on the X6B (PPM or i-BUS)?