
This might already b e in place, but I am trying to figure out how I can make my drone execute very specific commands (climb certain altitude, go left/right/forward/back so many meters). I know there are failsafes within mission planner alone, but I would like to set this up as another failsafe using the Rpi loaded script with a while loop when certain signals are interrupted.
While Loop Listener
jax200
#2
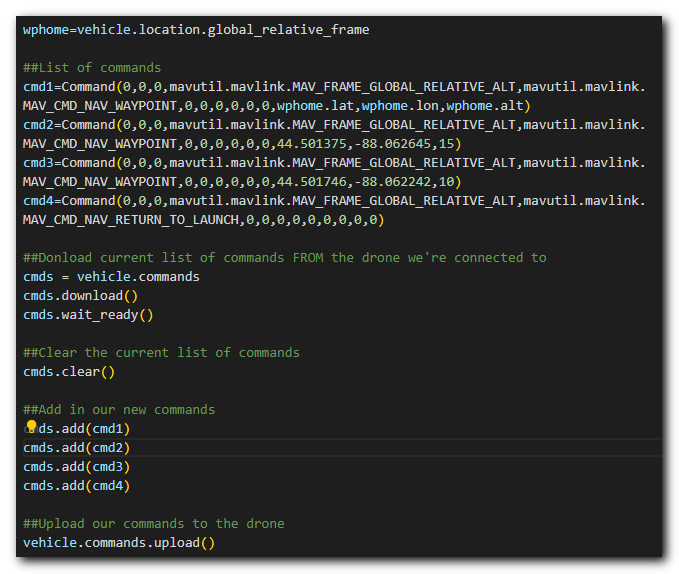
As you saw in the Programming Course, waypoint commands are one option to move the vehicle -
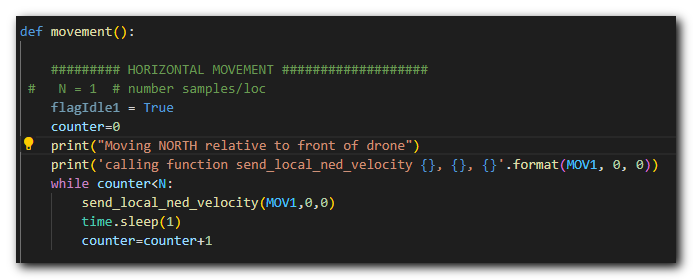
Another option is to use the local_ned_velocity command which I call in a subsequent function to move the copter around, where MOV1 is set to 0.25 earlier.
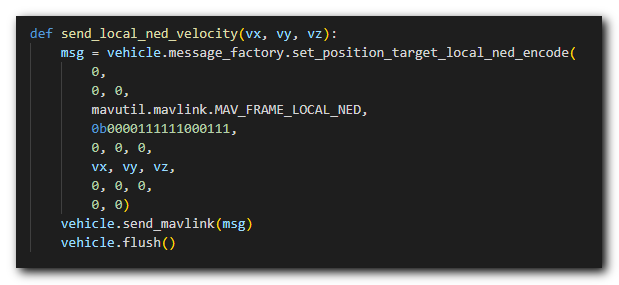
This can be used to move in any of the six directions of flight.