
Thanks to some assistance here, I am just about complete with my Raspberry Pi Drone build to include all the software setup. The only remaining issue is in regards to powering the Raspberry Pi. I have the Pi currently being powered by the Pixhawk Telemetry 2 port and its insufficient even with the LIPO battery fully charged as the Pi shuts down after about 30 or so seconds. I can plug the Pi in to power it through the USB-C port to get all the software installed on it, but I need a solution so I can fly the drone with power to the Pi from the LIPO battery. I saw another forum message with the suggestion to power the Pi by tapping power from the Pixhawk servo rail. Would this then replace the telemetry 2 power to the Pi GPIO pins or would you run this power to another location on the Pi?
Rasperry Pi power options and clarification
Not sure why you are having this issue, and sounds like something else is going on. The kit is robust as per the course. But you can tap from the Pixhawk power rail as long as it has power, eg, from an esc. So you would cut the telemetry power and ground wires then connect separately to the rail. The TELEM2 port signal wires are left alone.
You could also install a +5V/3A UBEC (universal battery elimination circuit) to power the rail or directly to the RPi. A UBEC is used to regulate the voltage down to a lower voltage (ie, +5V).
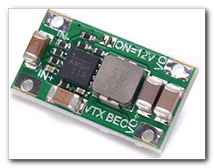
This requires cutting the +5V and GND cable wires and soldering them to the output wires of the UBEC. The UBEC input wires are soldered to the LiPO.
This approach is appealing for several reasons:
1] The UBEC can provide a reliable power source when you have other devices that load up the power demands of the drone such as range finders, optical flow, LEDs, servos, gimblels, cameras, etc. The flight controller is not designed really as a power source, but it is normally ok when you have low power demands.
2] When “OPTO” ESCs are used they cannot provide the power. These are electrically isolated devices to ensure the reliability of the esc signal. So another power source is needed. (The kit does not use this type of esc.)
3] You can use a separate, smaller LiPO for the UBEC and leave the larger one for flight.
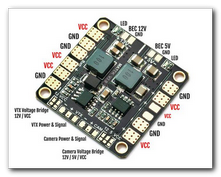
When using frames without integrated power distribution boards (PDB) you can get PDBs which include a ubec. This is often used when you want to add a separate camera such as used with first person view (FPV).
The lesson here is to consider your power demands when designing a drone. For this course the design is normally robust, but in the future your builds might be more complex.
To further clarify, for the first option, I would run wires directly from the power rail that should be getting power directly from the ESC for motor 1 (the UBEC lines for motors 2-4 were removed as directed in the video) to the GPIO pins after removing the power wires from the TELEM port?
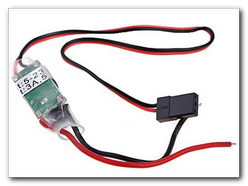
Option 2 (which you recommend as a better option): Use a +5V/3A UBEC (https://www.amazon.com/Servo-Helicopter-Airplane-Receiver-Supply/dp/B00VI0L94C/ref=sr_1_10?crid=1QU9Y3OT6CKI3&keywords=%2B5V%2F3A+UBEC+(universal+battery+elimination+circuit)&qid=1640953123&sprefix=5v%2F3a+ubec+universal+battery+elimination+circuit+%2Caps%2C71&sr=8-10)
What +5V/GND wires do I need to cut and after I solder them to the new UBEC, where on the LiPO do I solder the UBEC to?
Finally, any idea why the Raspberry Pi is not being sufficiently powered in the first place? You allude to upfront that this shouldn’t really be an issue. Is there something else I should try and troubleshoot first? Everything else appears to be working on the drone so far.
“To further clarify…” Yes. +5V/GND both.
You would cut the VCC/GND wires from TELEM port because you won’t power the RPi from it. Then solder the UBEC input to the PDB (any +/- will do) and put a dupont connector on the UBEC output and run to the +5v/GND of the RPi. It is now its source of power. Sometimes it is recommended to put a capacitor (eg, 100uF) on the UBEC to smooth out fluctuations, but often they come included. You can check the voltage on the new wire with a VOM meter.
Use your VOM meter to evaluate the voltage coming out of the Pixhawk TELEM port. If its +5V then it is ok. If so and the RPi continues to shut down, you should search on RPi forums for an answer.
Here is what I found out. The power coming out of the TELEM port shows 4.72v, while the voltage coming off the Pixhawk power rail shows 5.0v exactly. I than ran the power to the RPI from the power rail and while the lights on the RPI stay on, they go off for a moment then come back on and the OS doesn’t load. So at this point, it looks like my only option is to go the ‘+5V/3A UBEC’ route that you suggested unless you or anyone else has any ideas why neither the TELEM port or the power rail can provide enough power for the RPI to stay on.
Roadrunner2000 resolved what looks like the same issue running an esc power to the RPi. But that is like going from the rail.
This topic was automatically closed 7 days after the last reply. New replies are no longer allowed.