Hi
My Pixhawk drone has been built and flying like a charm, using the Remote Controller. But I’ve run into some issues with the automated side of things. Specifically, I’m simply following the tutorial steps - https://www.youtube.com/watch?v=kB9YyG2V-nA&t=1945s - from 21:00-28:00.
The drone ‘armed’ successfully, using MavProxy (27:15), without any issues (on my first attempt only).
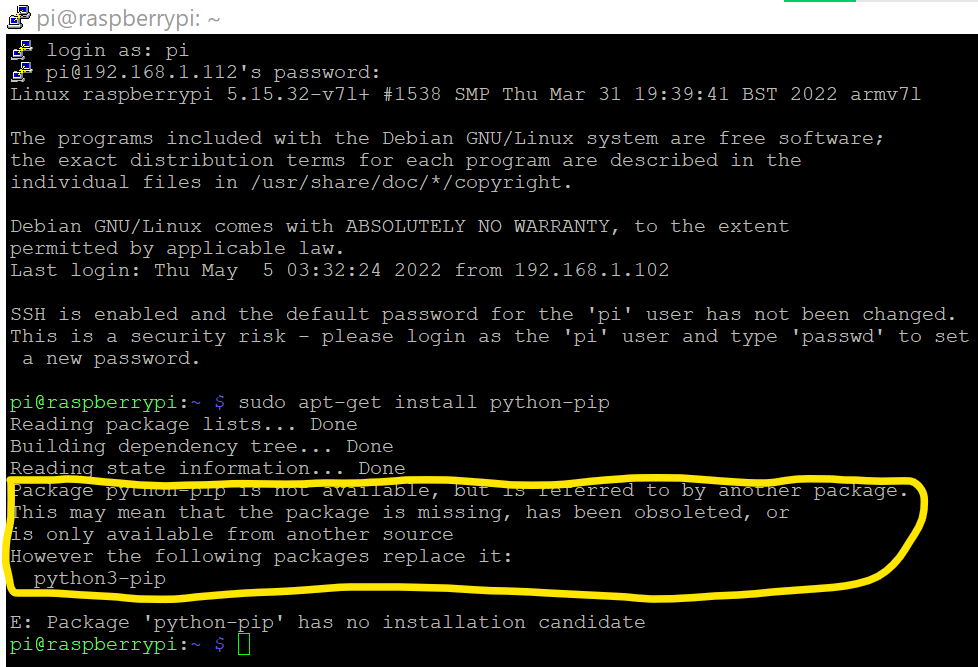
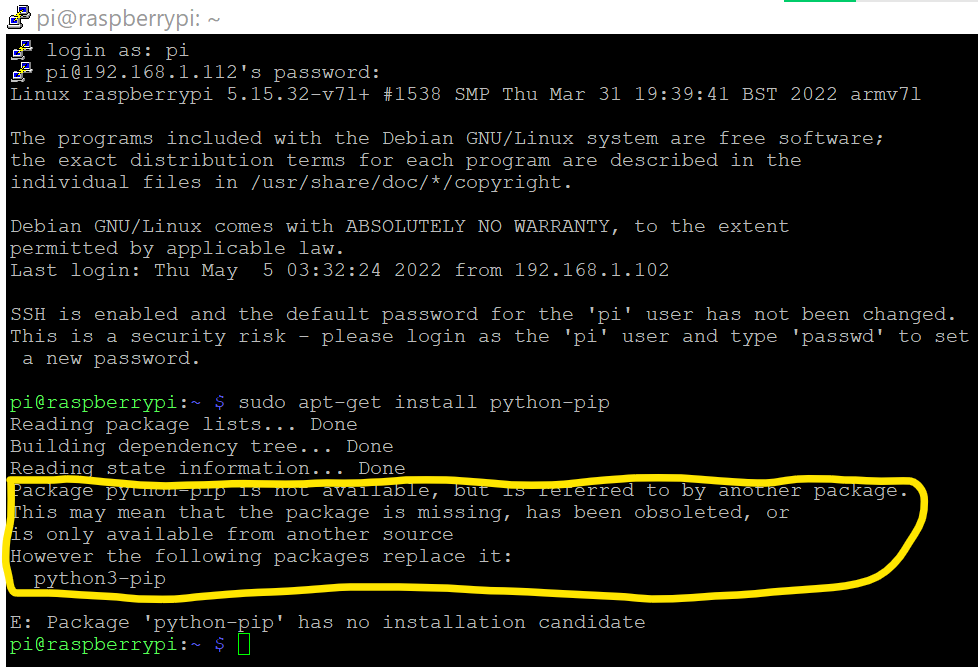
On my 2nd attempt, I once again installed all of the Python dependencies using Putty and followed the above steps. I did this on the basis that I had no prior confirmation (whilst logged into Putty) that all of the steps/actions had been cemented/written permanently during my 1st session. I’m merely guessing that repeating all of the steps is what led to me (not) being able to ‘arm’ on a subsequent attempt. Unfortunately I’m unable to recall which exact attempt this was …
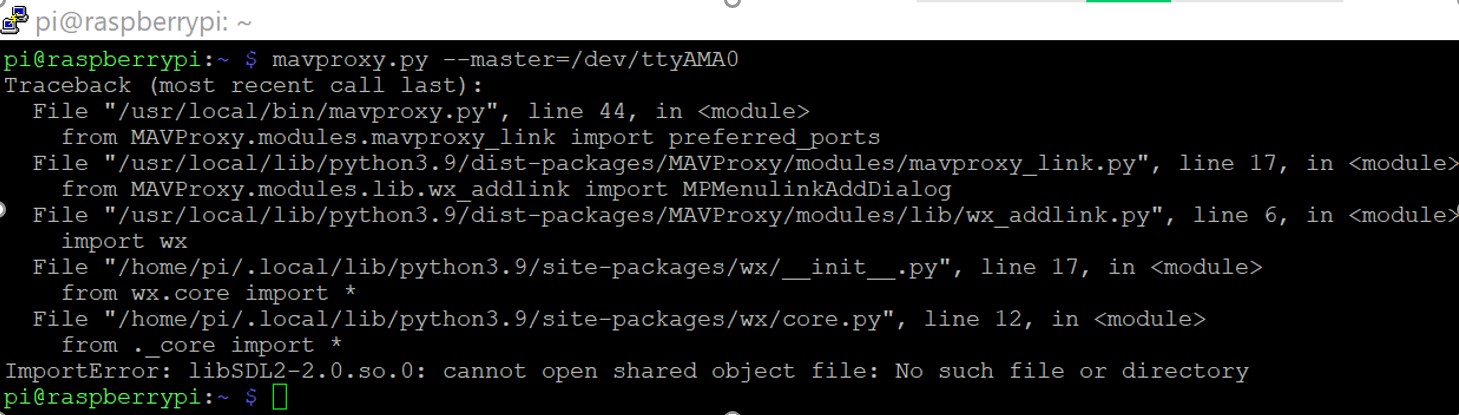
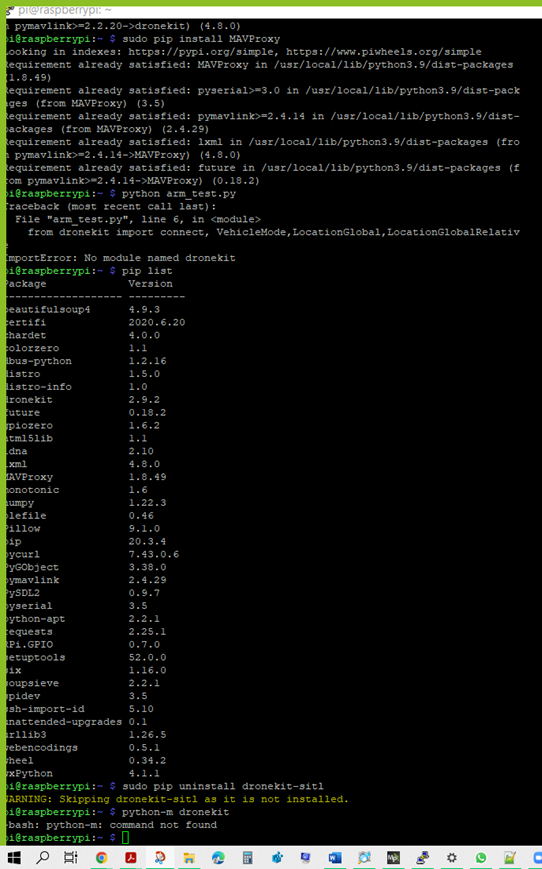
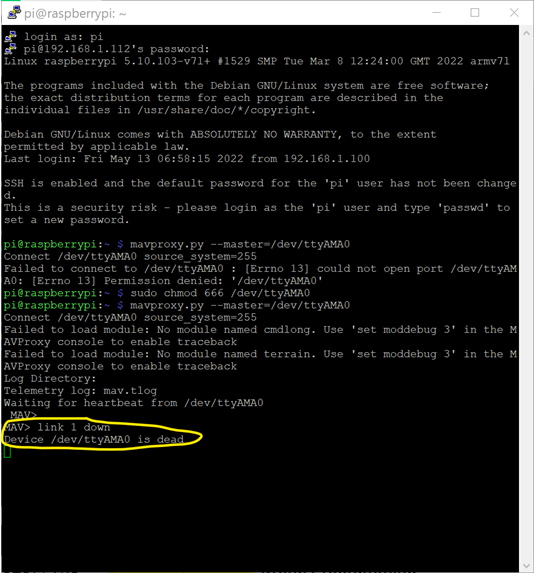
In case the screenshot below doesn’t open, here is a copy/pasted Putty response following my ‘mavproxy.py --master=/dev/ttyAMA0’ command:
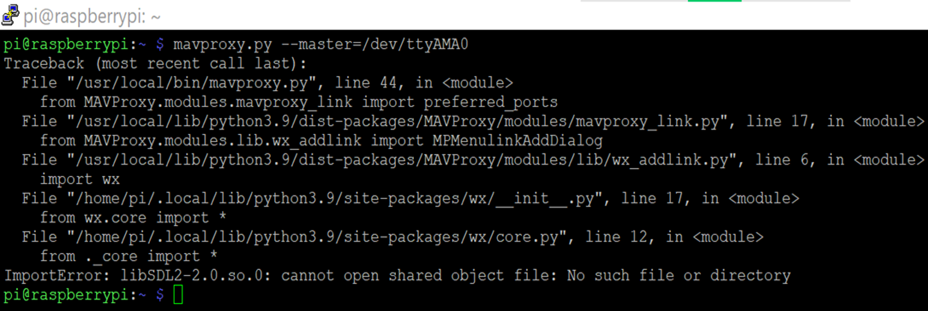
Traceback (most recent call last):
File "/usr/local/bin/mavproxy.py", line 44, in <module>
from MAVProxy.modules.mavproxy_link import preferred_ports
File "/usr/local/lib/python3.9/dist-packages/MAVProxy/modules/mavproxy_link.py", line 17, in <module>
from MAVProxy.modules.lib.wx_addlink import MPMenulinkAddDialog
File "/usr/local/lib/python3.9/dist-packages/MAVProxy/modules/lib/wx_addlink.py", line 6, in <module>
import wx”
File "/home/pi/.local/lib/python3.9/site-packages/wx/init.py", line 17, in <module>
**from wx.core import ***
File "/home/pi/.local/lib/python3.9/site-packages/wx/core.py", line 12, in <module>
**from ._core import ***
ImportError: libSDL2-2.0.so.0: cannot open shared object file: No such file or directory
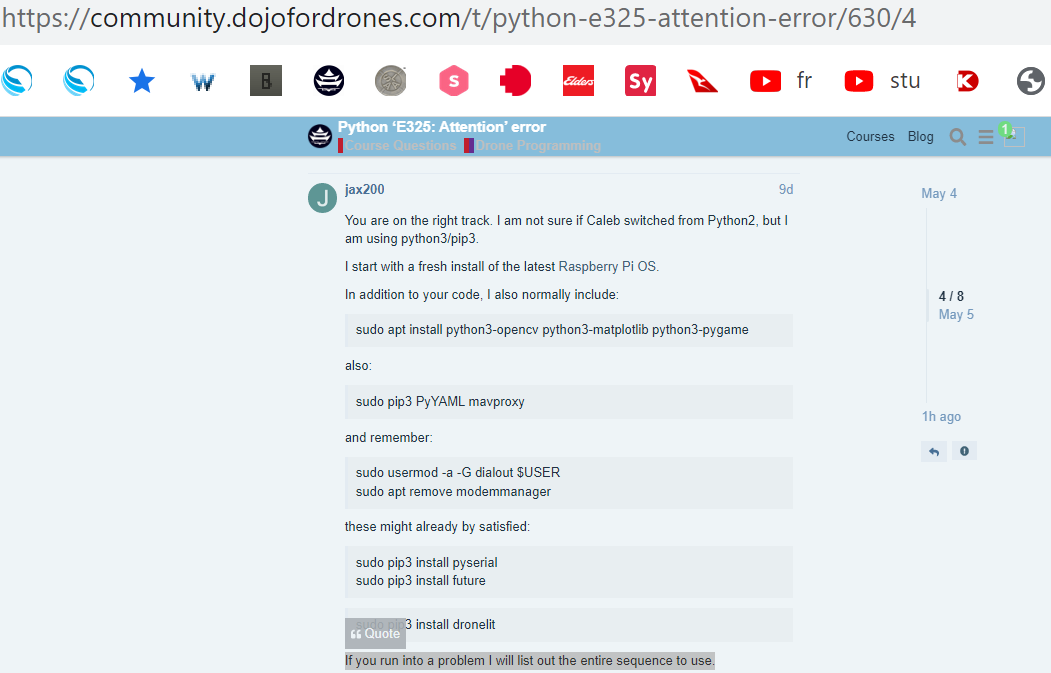
I recognise that if the drone can no longer be armed, it’s probably useless to attempt the subsequent DroneKit mission writing … But in any case, when I now enter the ‘vi takeoff_and_land.py’ command, Putty responds with the (attached) ‘E325: Attention’ error. If the attachment fails to open for whatever reason, here is the copy/pasted response:
![ARMING%20ERROR|690x196]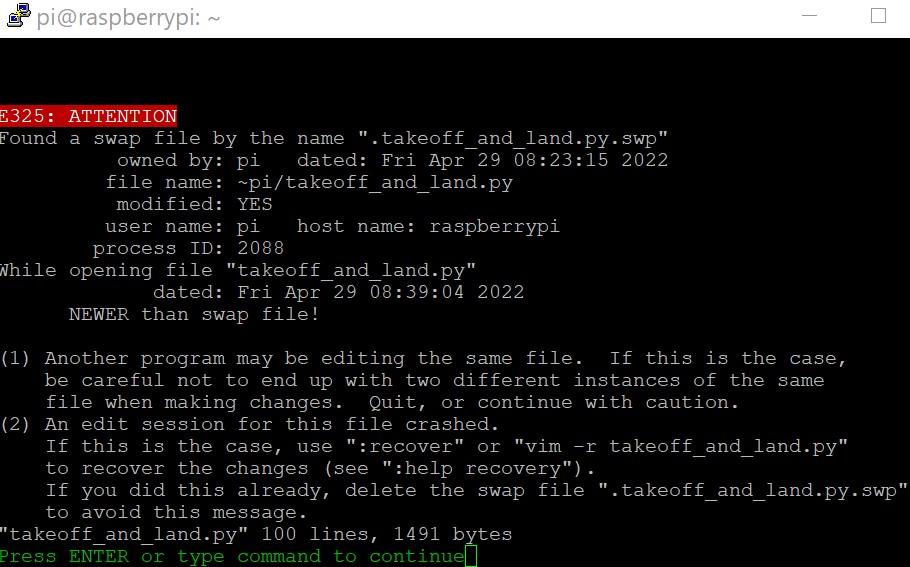
E325: ATTENTION
Found a swap file by the name ".takeoff_and_land.py.swp"
owned by: pi dated: Fri Apr 29 08:23:15 2022
file name: ~pi/takeoff_and_land.py
modified: YES
user name: pi host name: raspberrypi
process ID: 2088
While opening file "takeoff_and_land.py"
dated: Fri Apr 29 08:39:04 2022
NEWER than swap file!
(1) Another program may be editing the same file. If this is the case,
be careful not to end up with two different instances of the same
file when making changes. Quit, or continue with caution.
(2) An edit session for this file crashed.
If this is the case, use ":recover" or "vim -r takeoff_and_land.py"
to recover the changes (see ":help recovery").
If you did this already, delete the swap file ".takeoff_and_land.py.swp"
to avoid this message.
"takeoff_and_land.py" 100 lines, 1491 bytes
Press ENTER or type command to continue
I’m just a beginner to the coding side of things, and I couldn’t find much help online. So I figured that I could possibly just reflash the MissionPlanner firmware onto a (new/formatted) SD Card and start from scratch (installing Python dependencies before ‘arming’). Upon doing so, the ‘Advanced IP Scanner’ doesn’t recognize the new SD card, but it (does) recognize the old SD card.
I also connected the telemetry cable to another functional Raspberry Pi 4, and repeated the above process, but again, the ‘Advanced IP Scanner’ doesn’t recognise the new SD card, while recognising the old SD card.
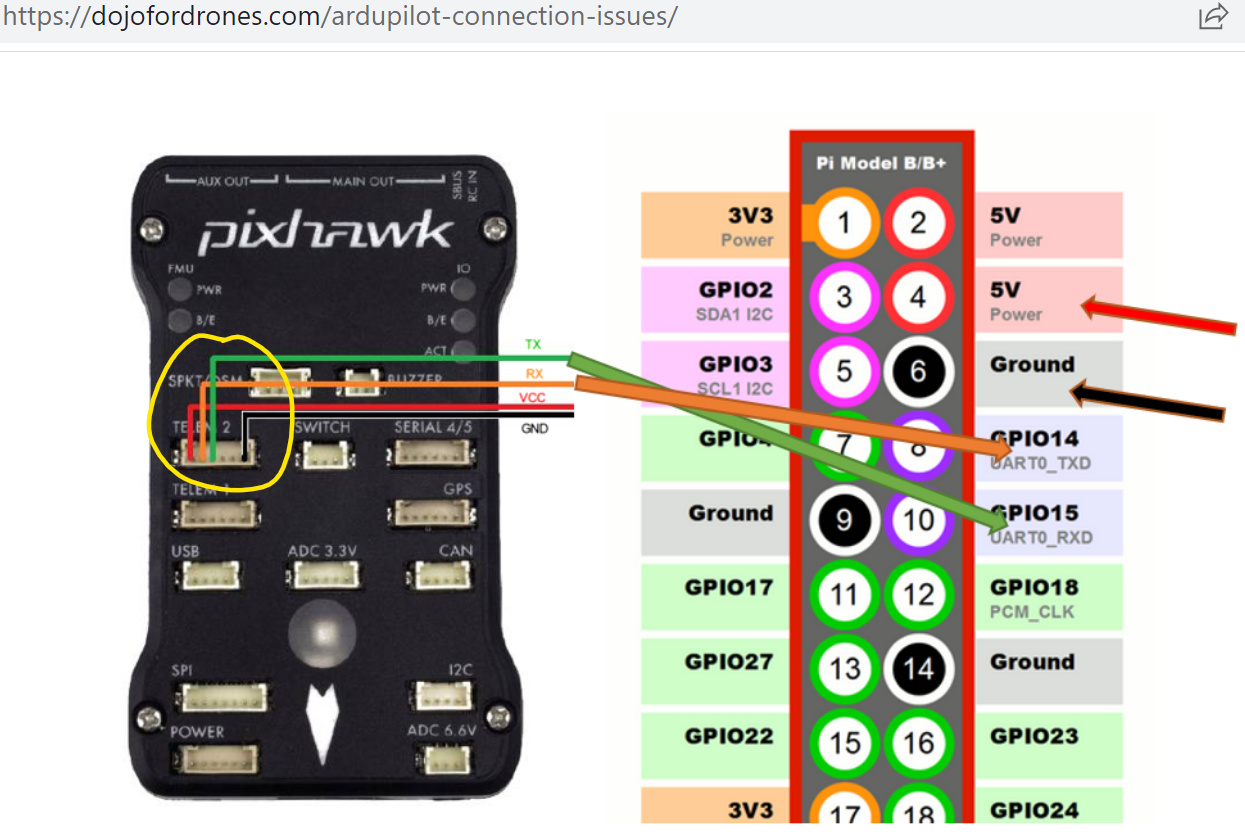
I followed this Dojo Troubleshooting Guide: https://dojofordrones.com/ardupilot-connection-issues/ , which I found online, and can confirm that I’ve actioned the ‘Common Reasons’ #: 1, 3, 4, 6, 8 recommendations, but the issue persists. I struggle to see how the remaining Reasons could be a culprit, and/or I’m struggling to wrap my head around the recommendations anyhow …
Please let me know if there’s anything you can suggest
Best regards
Ben