I have been trying to build this with Strawberry Pi and a Pixhawk. I give up!! I followed directions to use just the Pixhawk and not the StrawberryPi but it still won’t work!! I left the PPM connected. Maybe that is the issue? Maybe take the PPM off and retry? Very frustrated. Cost a bit to get everything so hate to not have it fly. Any input would help. My email is nhtrader2@hotmail.com. Thanks in advance!!
Drone building and programming can be a frustrating experience - I know that first hand. That is why this course is quite valuable and unique.
There may be one or more reasons for your failures. Perhaps you could backup a bit and try to dissect your issues down to more simple and solvable questions?
As you proceeded through the build course, at what point did you experience a problem?
You state you first tried building without a companion, but it didn’t work. Can you elaborate?
How did you connect the ppm to the rx? Did you confirm the wire orientation?
Sometimes I will “build” the core hardware on my desk first before full installation. For example, try connecting your fc with a power source (ie, lipo and power module), rx (ie, receiver) and radio (Sik Radio) only - no escs, motors, etc… Bring up Mission Planner or QGC, load the latest appropriate firmware, configure the SIK radio, and run through the basic setup for accelerometer, compass, and transmitter radio. If there are issues here then you can further dissect them as to what failed.
If all ok, then you can then add to this build or try putting it on a frame with PDB, connect the motors/escs. Then that would be the next stage of success.
But don’t give up !! ; )
I disconnected the Strawberry Pi and am just using the Pixhawk. I downloaded Mission Planner and that went well. The GPS works fine. Problem is the motors will not work. If I plug them directly into the receiver they spin but on separate sticks. The PPM is suppose to make that signal 1 so the motors spin using the throttle stick. Thats where I’m stuck at for now. I have it set up like this diagram. https://ardupilot.org/copter/_images/Pixhawk-Inforgraphic2.jpg Also the light on the Pixhawk stays white. Can’t get it to go green
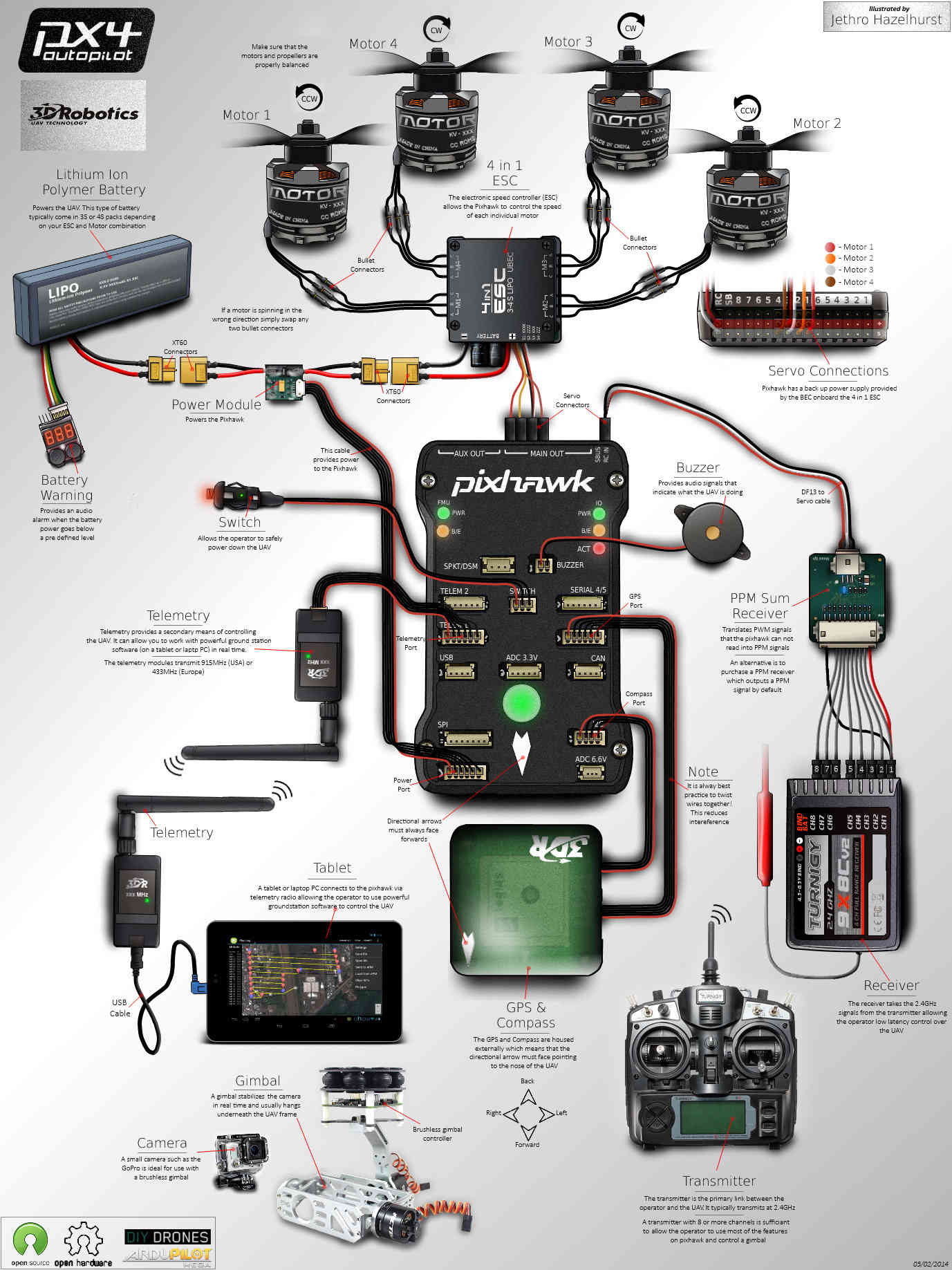{kind=link}
Your assumption sounds correct. It does this with each esc? Then I would think something amiss with the rx? Try a different rx?
The Pixhawk LED might initially be white but should turn to some other color (ref: [https://ardupilot.org/copter/docs/common-leds-pixhawk.html].).
nhtrader2zzz,
I understand your pain. I am new to this as well. I just started assembling my drone kit yesterday morning, got it finished, and was able to do short flight in the freezing cold last night. It took about 6 hrs to get the assembly done and another 6 hours to trudge my way through the setup.
As jax2000 asked, what color is your main Pixhawk LED blinking? Is it blinking JUST white or JUST green or something else?
nhtrader2zzz,
Here are a couple of other questions for you:
- If you bought the kit, are you using a FLYSKY transmitter?
- If so, have you run through the transmitter set up in the “How to Build a Raspberry Pi Drone” course?
- Have you setup your FLYSKY for Helicopter Fixed Pitch?
- Have you pressed the safety switch so it is a steady color (mine is green)? Or is the safety switch blinking?
- If your Pixhawk primary LED is flashing green, have you armed the drone by bringing the throttle joystick to the lower RH corner?
- Are you “connected” to Mission Planner? If so, what does it say in your artificial horizon? Do you have a big red “DISARMED” indication, or are all of the red warnings cleared?
Note, I am NEW to all of this. I even had to Google “FS-i6 user manual” to figure out how to program the transmitter, since Caleb’s Setting Up the RC Controller video is for an FS-T6.