
Afternoon all. My drone seems to be working almost perfectly during flight tests as it gets off the ground and both yaw and roll work fine; however, the pitch is reversed. I don’t have a reverse option in Mission Planner in the radio calibration menu. Am I possibly using a wrong configuration or is there something I need to do to the radio controller? The RC controller works perfectly with Liftoff.
Pitch is reversed
jax200
#2
What transmitter are you using? Did you read the manual?
Did you try a web search? “flysky fs-i6 pitch reversed”
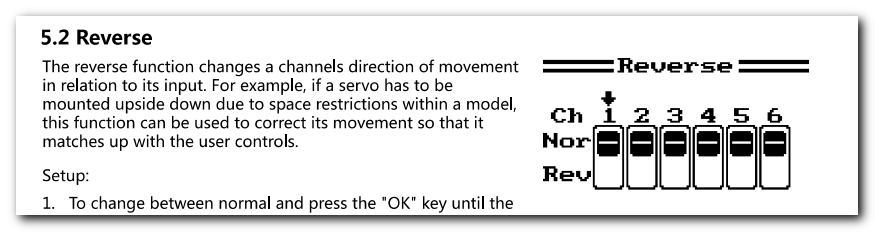
For the FlySky FS-i6 -
Mongoose
#3
Good morning. Reversing channel 2 on the Flysky is the solution I came up with last night. I then had to invert the pitch control on the Liftoff simulator to compensate to make it work with the change on the controller. That being said, I don’t know if there is something I wired incorrectly or perhaps something I needed to do in the programming of the Pixhawk to rectify the pitch in the first place. I hope to build several more drones and use the same controller and am concerned that by reversing the channel as the solution it may cause issues in the future.
jax200
#4
You are correct, making this compensation is not a good solution. I thought of possible reasons this might occur, eg, backward orientation of the fc, wiring incorrectly, etc., but those would cause roll or/and yaw problems. You probably already ran through the course instructions, double-checked the wiring, re-calibrated in Mission Planner. Did you double-check you have the correct frame/class setting, ie, quad X ?
Does a Motor Test in MP check out correctly?
See this -
https://discuss.ardupilot.org/t/reversed-pitch-in-my-ardupilot/33849/11
system
closed
#5
This topic was automatically closed 7 days after the last reply. New replies are no longer allowed.