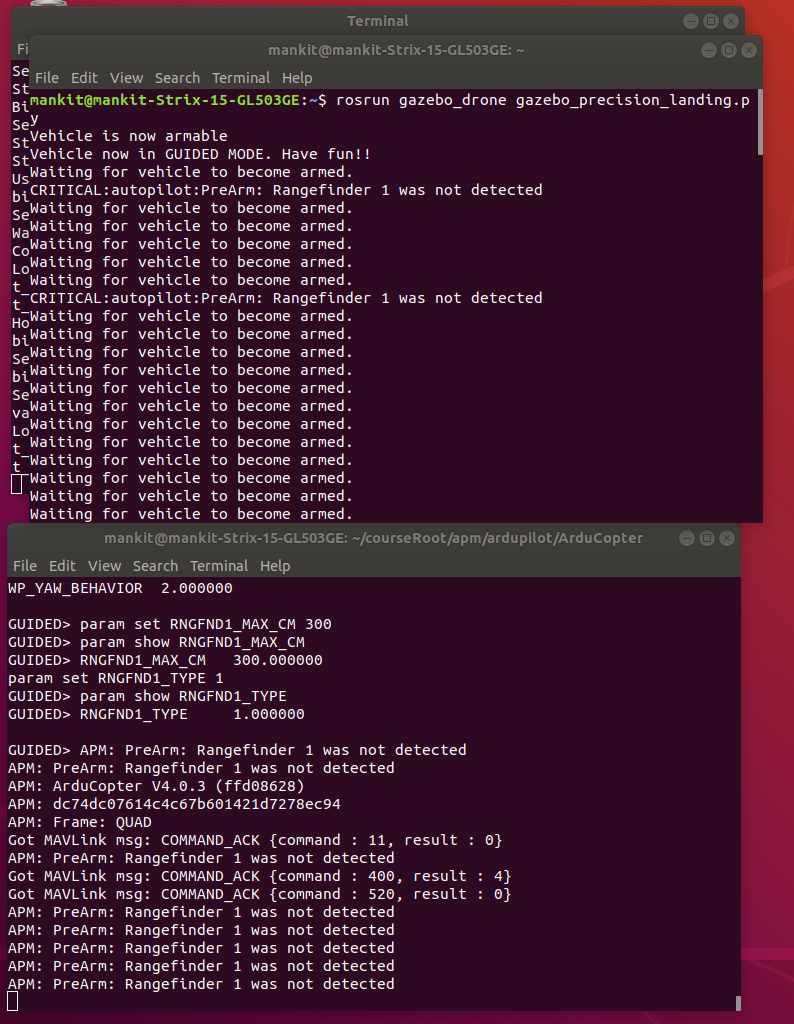
I followed the " Write Dronekit Script to Precision Land on Aruco" video managed to make the drone takeoff and detect the aruco market, however during landing the drone does not maneuver to position itself on the marker and lands vertically. I tried to double check if there is any error messages but theres none. Anyone could help me check out if theres anything wrong with my code?
gazebo_precision_landing.py (6.0 KB)