I cannot figure this out. I got an syntaxError on width=640 but cannot find a way to fix it. Any help 
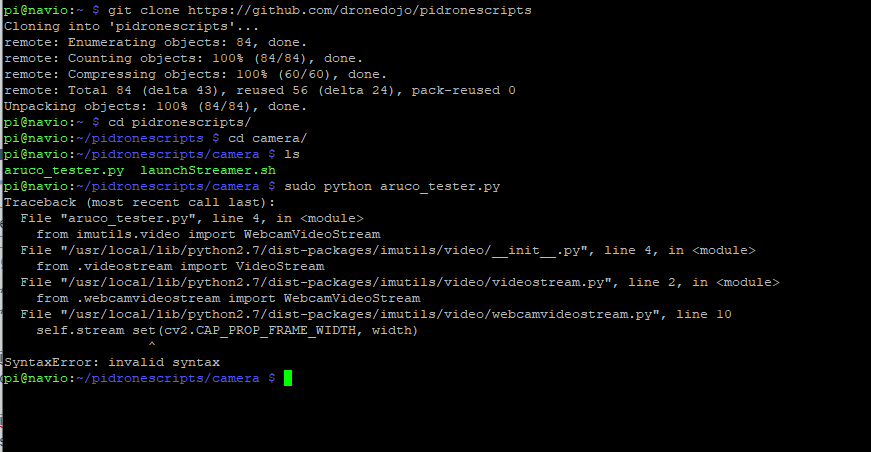
Running the aruco tester i got syntaxError on width=640
Traceback (most recent call last):
File “aruco_tester.py”, line 4, in
from imutils.video import WebcamVideoStream
File “/usr/local/lib/python2.7/dist-packages/imutils/video/init.py”, line 4, in
from .videostream import VideoStream
File “/usr/local/lib/python2.7/dist-packages/imutils/video/videostream.py”, line 2, in
from .webcamvideostream import WebcamVideoStream
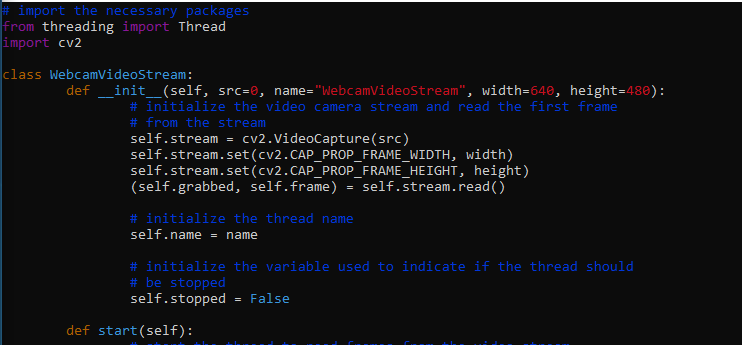
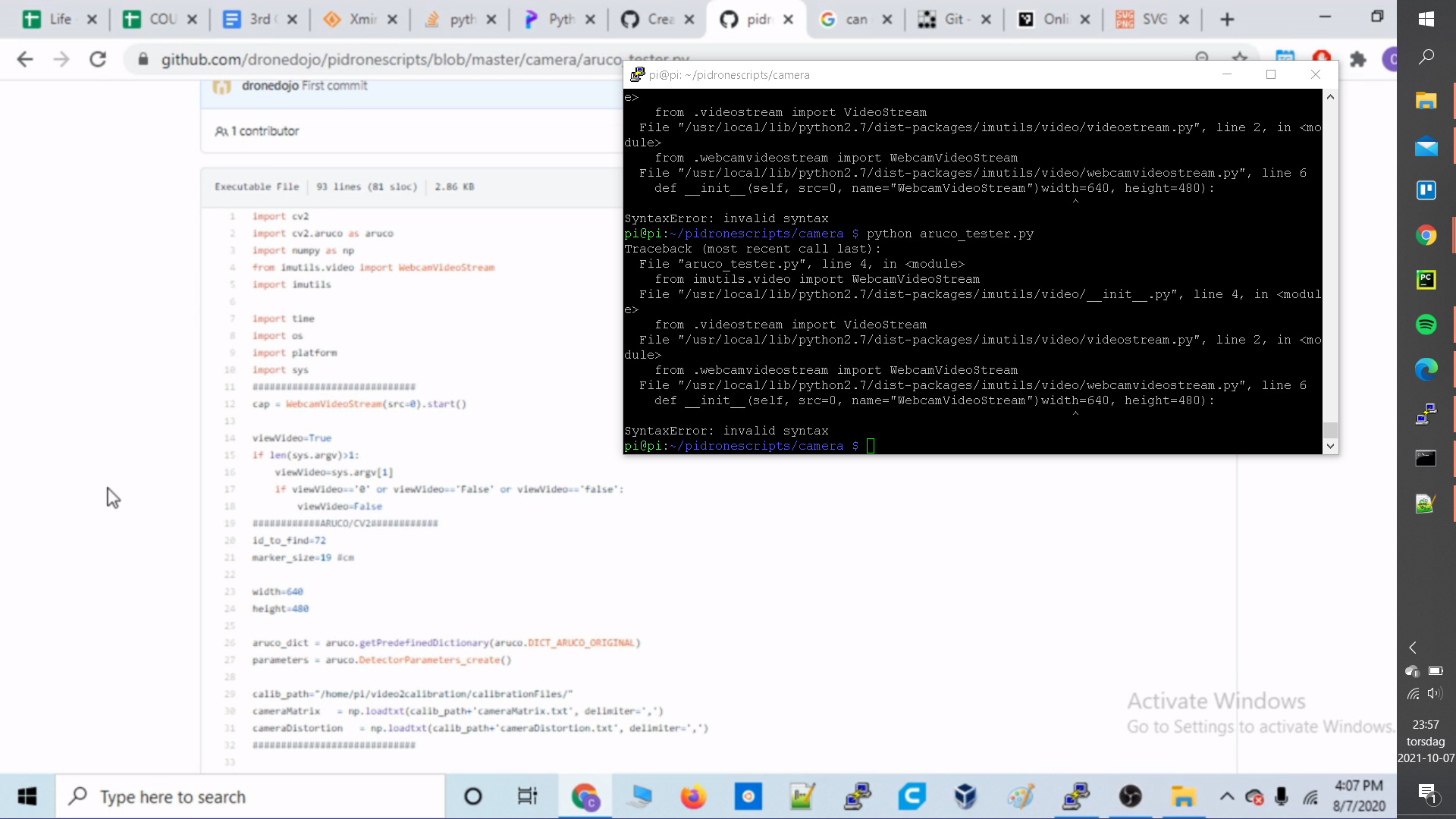
File “/usr/local/lib/python2.7/dist-packages/imutils/video/webcamvideostream.py”, line 6
def init(self, src=0, name=“WebcamVideoStream”)width=640, height=480):
Down below is the scripts:
import cv2
import cv2.aruco as aruco
import numpy as np
from imutils.video import WebcamVideoStream
import imutils
import time
import os
import platform
import sys
#############################
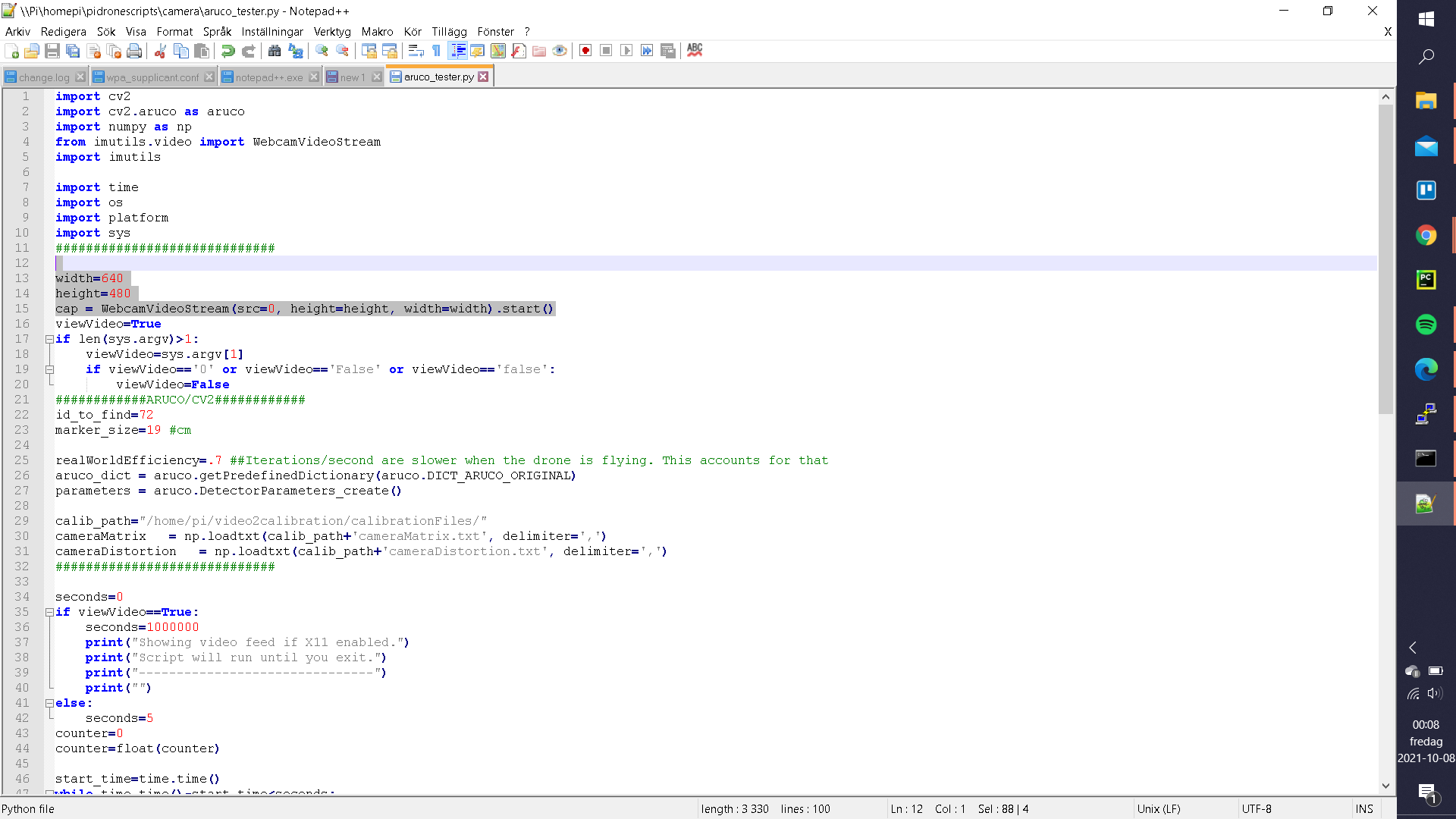
width=640
height=480
cap = WebcamVideoStream(src=0, height=height, width=width).start()
viewVideo=True
if len(sys.argv)>1:
viewVideo=sys.argv[1]
if viewVideo==‘0’ or viewVideo==‘False’ or viewVideo==‘false’:
viewVideo=False
############ARUCO/CV2############
id_to_find=72
marker_size=19 #cm
realWorldEfficiency=.7 ##Iterations/second are slower when the drone is flying. This accounts for that
aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_ARUCO_ORIGINAL)
parameters = aruco.DetectorParameters_create()
calib_path="/home/pi/video2calibration/calibrationFiles/"
cameraMatrix = np.loadtxt(calib_path+‘cameraMatrix.txt’, delimiter=’,’)
cameraDistortion = np.loadtxt(calib_path+‘cameraDistortion.txt’, delimiter=’,’)
#############################
seconds=0
if viewVideo==True:
seconds=1000000
print(“Showing video feed if X11 enabled.”)
print(“Script will run until you exit.”)
print("-------------------------------")
print("")
else:
seconds=5
counter=0
counter=float(counter)
start_time=time.time()
while time.time()-start_time<seconds:
frame = cap.read() #for Threaded webcam
frame = cv2.resize(frame,(width,height))
frame_np = np.array(frame)
gray_img = cv2.cvtColor(frame_np,cv2.COLOR_BGR2GRAY)
ids=''
corners, ids, rejected = aruco.detectMarkers(image=gray_img,dictionary=aruco_dict,parameters=parameters)
if ids is not None:
print("Found these IDs in the frame:")
print(ids)
if ids is not None and ids[0] == id_to_find:
ret = aruco.estimatePoseSingleMarkers(corners,marker_size,cameraMatrix=cameraMatrix,distCoeffs=cameraDistortion)
rvec,tvec = ret[0][0,0,:], ret[1][0,0,:]
x="{:.2f}".format(tvec[0])
y="{:.2f}".format(tvec[1])
z="{:.2f}".format(tvec[2])
#print("FOUND ARUCO!")
marker_position="MARKER POSITION: x="+x+" y="+y+" z="+z
print(marker_position)
print("")
if viewVideo==True:
aruco.drawDetectedMarkers(frame_np,corners)
aruco.drawAxis(frame_np,cameraMatrix,cameraDistortion,rvec,tvec,10)
cv2.imshow('frame',frame_np)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
else:
print("ARUCO "+str(id_to_find)+"NOT FOUND IN FRAME.")
print("")
counter=float(counter+1)
if viewVideo==False:
frequency=realWorldEfficiency*(counter/seconds)
print("")
print("")
print("---------------------------")
print(“Loop iterations per second:”)
print(frequency)
print("---------------------------")
print("Performance Diagnosis:")
if frequency>10:
print("Performance is more than enough for great precision landing.")
elif frequency>5:
print("Performance likely still good enough for precision landing.")
print("This resolution likely maximizes the detection altitude of the marker.")
else:
print("Performance likely not good enough for precision landing.")
print("MAKE SURE YOU HAVE A HEAT SINK ON YOUR PI!!!")
print("---------------------------")
cv2.destroyAllWindows()