Hello, I’ve gone through the course and built the Raspberry Pi Linux/Navio based drone and I am able to get the drone to takeoff using the Takeoff and Land script.
However, the drone shakes in mid-air and always ends up crashing into the ground - every time. I have uploaded a video of the drone showing how it acts while flying. I also notice the message in my terminal shows the drone as never reaching altitude, which is set to 2.
I am not sure if this is a error within the code, within the setup of the drone - which I have redone multiple times, or an issue with the sensors located on the navio.
Here is a link to a brief clip demonstrating the drone’s unstable flying.
My first suggestion is move it over to the grassy area and away from concrete!
How does it fly just with a transmitter? If it is not stable flying manually, then it clearly has nothing to do with the script (which I doubt it does).
There can be various reasons contributing to an imbalance of the system.
1 Incorrect prop placement
2 Incorrect prop rotation
3 ESCs not properly calibrated
4 Improper PIDs - the initial PID configuration should be ok to use Autotune
5 Poor weight distribution
Since it immediately goes into an unstable yaw, I would guess it is 1, 2 or 3.
This looks exactly like the problem I opened with Emlid at this link.
They ended up not really answering any of my questions and wanted me to do all of their QC.
Essentially, the problem I found was that any ArduCopter version in the 4’s (4.0.0, 4.0.1, 4.0.2 etc) would exhibit this crazy takeoff behavior.
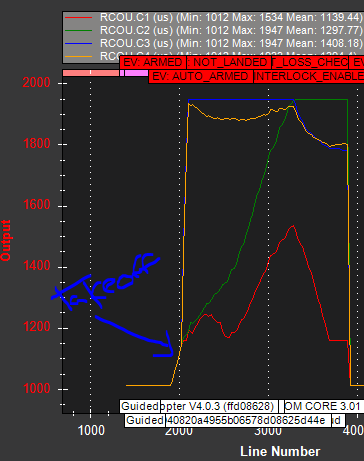
If you pull up the logs and graph the motor output, you should see what I saw, which is 2 of the motors are full throttle and the other two are lagging. This seems to only happen in GUIDED mode and goes away with manual flight modes.
My suggestion is to go down to ArduCopter in the 3.5’s or 3.6’s
if you are currently using AC in the 4.0’s or 4.1’s