hi,
Im at the course “connect drone to MP via internet only”
I am able to connect using the MP interphase but unable to do it via scripts.
read an older blog here but could not make it happen.
I also followed the steps in the youtube video “make your own pixhawk rpi dorn in 36 minutes”.
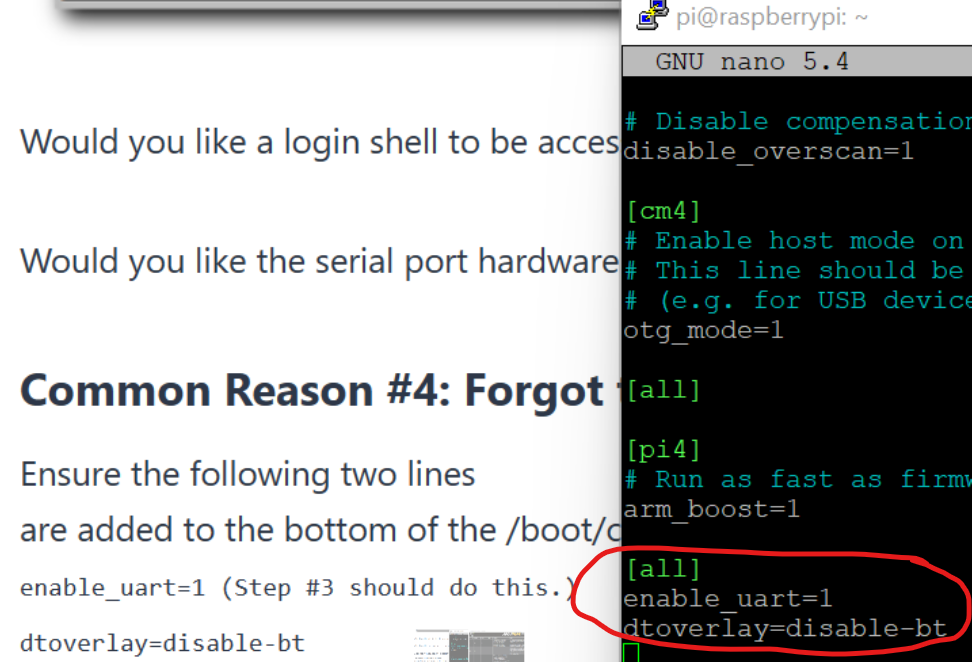
following the steps in the youtube video, I did change the RPI config tool ad also edited the boot/config.txt file.
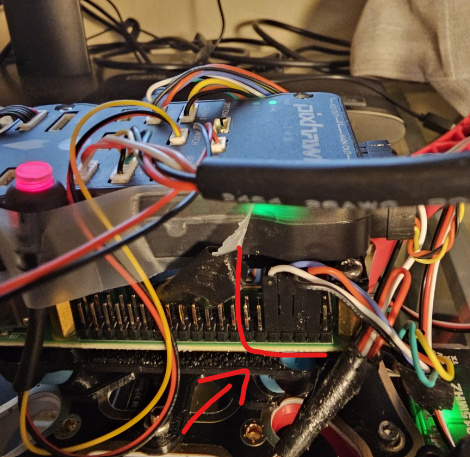
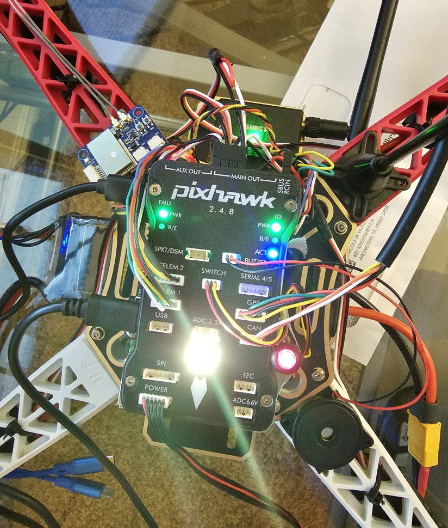
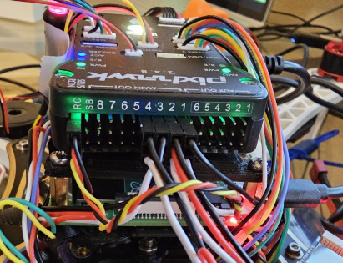
when I connect the rpi to power, the pixhawk does get power too.
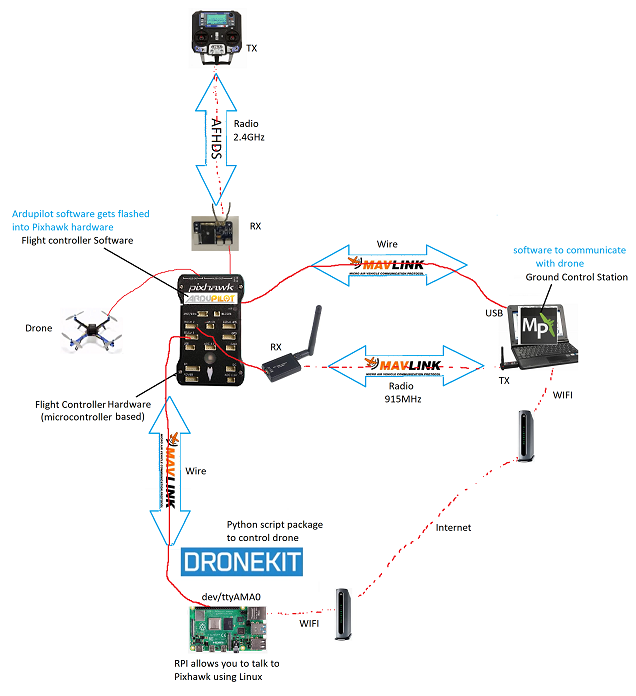
this is what I get with /dev/ttyAMA0 (youtube video)
pi@raspberrypi:~ $ mavproxy.py --master=/dev/ttyAMA0 --baud 57600
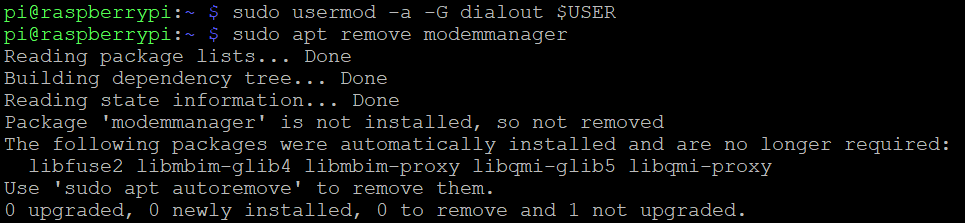
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect /dev/ttyAMA0 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from /dev/ttyAMA0
MAV> Detected vehicle 1:1 on link 0
online system 1
Mode(0)> Mode Mode(0)
fence present
AP: ArduCopter V4.3.3 (34e8e02c)
AP: ChibiOS: 66e5de0d
AP: Pixhawk1 00410041 30365115 31313731
AP: RCOut: PWM:1-14
AP: IMU0: fast sampling enabled 8.0kHz/1.0kHz
AP: Frame: UNSUPPORTED
Received 936 parameters (ftp)
Saved 936 parameters to mav.parm
AP: GPS Glitch or Compass error
AP: EKF variance
AP: PreArm: Motors: Check frame class and type
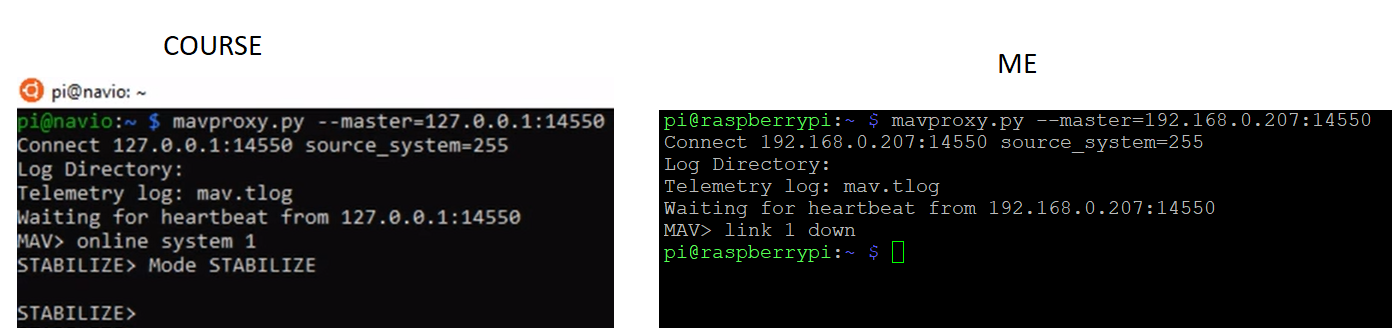
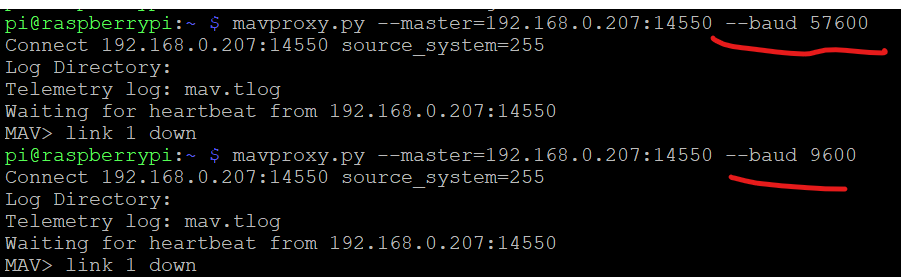
this is what I get with IP (dojo course)
pi@raspberrypi:~ $ mavproxy.py --master=192.168.0.207:14550
WARNING: You should uninstall ModemManager as it conflicts with APM and Pixhawk
Connect 192.168.0.207:14550 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from 192.168.0.207:14550
MAV> link 1 down
for this modemmanager error I did disable it, same error
used:
sudo systemctl disable ModemManager.service …
…