
Hi
Is there a way to manually disarm the drone (e.g. pushing the RC’s throttle lever down & left) whilst running a script, such as for the (attached) basic takeoff & land mission? I tried this, i.e. “pushing the RC’s throttle lever down & left”, but it doesn’t work, at least for me …
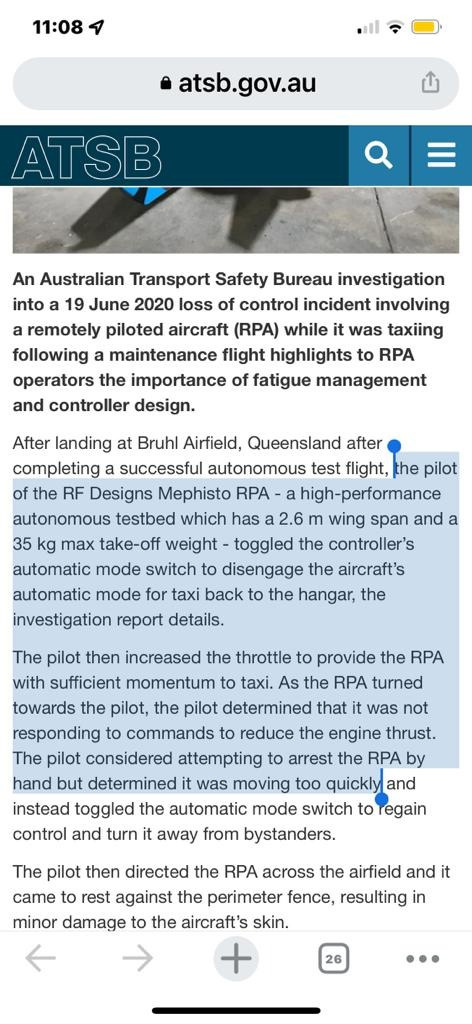
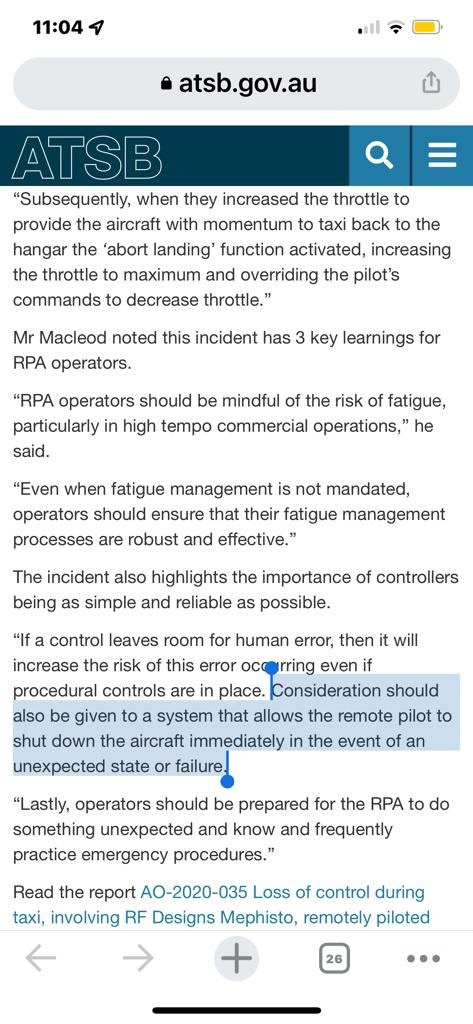
I personally thought it was a little unsafe to not introduce any emergency safety measure (in the online course tutorial). But my local government local Transport Safety Bureau appears to agree, based on a recent incident (applicaple details highlighted in the attachments): https://www.atsb.gov.au/media/news-items/2022/rpa-loss-of-control/
For this reason, I earlier practiced (for an emergency situation) pulling out the ESC cables from the flight controller’s servo rail while the motors are highy active (the battery is to hard to get to/unplug while the props are spinning). But this indirectly resulted in the blowing up of one of the ESCs, & damaging it’s motor.
I replaced the ESC, but not the motor (I didn’t know at the time that the motor was damaged), so the new ESC blew & actually caught fire …
Kind regards
Ben