Hi Caleb I’m very glad to see you checked in on the questions. Since I did not hear back, I tried going over to udemy to ask another question I had, but did not hear back and had to bail.
Since I have your attention, I would appreciate it if you could answer my one lingering question that has bugged me for months. I was able to run all the dronekit bash scripts except for auto_mission.py. I simply cannot get it to work. I’ve reinstalled everything from scratch more than once, examined the code in detail, yet no luck.
It’s just copied from your script:
> #########DEPENDENCIES####################
>
> from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
> import time
> import socket
> import exceptions
> import math
> import argparse
> from pymavlink import mavutil
>
> ##########FUNCTIONS######################
>
> def connectMyCopter():
>
> parser = argparse.ArgumentParser(description='commands')
> parser.add_argument('--connect')
> args = parser.parse_args()
>
> connection_string = args.connect
>
> if not connection_string:
> import dronekit_sitl
> sitl = dronekit_sitl.start_default()
> connection_string = sitl.connection_string()
>
> vehicle = connect(connection_string,wait_ready=True)
>
> return vehicle
>
> def arm_and_takeoff(targetHeight):
> while vehicle.is_armable!=True:
> print("Waiting for vehicle to become armable")
> time.sleep(1)
> print("Vehicle is now armable")
>
> vehicle.mode = VehicleMode("GUIDED")
>
> while vehicle.mode!='GUIDED':
> print("Waiting for drone to enter GUIDED flight mdoe")
> time.sleep(1)
> print("Vehicle now in GUIDED MODE. Have fun!!")
>
> vehicle.armed = True
> while vehicle.armed==False:
> print("Waiting for vehicle to become armed")
> time.sleep(1)
> print("Look out! Virtual props are spinning!!")
>
> vehicle.simple_takeoff(targetHeight) ##meters
>
> while True:
> print("Current Altitude: %d"%vehicle.location.global_relative_frame.alt)
> if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
> break
>
> time.sleep(1)
> print("Target altitude reached!!")
>
> return None
>
>
> ##########MAIN EXECUTABLE#################
>
> vehicle = connectMyCopter()
>
>
> ##Command template
> #Command(0,0,0,FrameOfReference,MAVLinkCommand,CurrentWP,AutoContinue,param1,param2,param3,param4,param5,param6,param7)
>
> wphome=vehicle.location.global_relative_frame
>
> ##List of commands
> cmd1=Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,wphome.lat,wphome.lon,wphome.alt)
> cmd2=Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,44.501375,-88062645,15)
> cmd3=Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,44.501746,-88062242,10)
> cmd4=Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_RETURN_TO_LAUNCH,0,0,0,0,0,0,0,0,0)
>
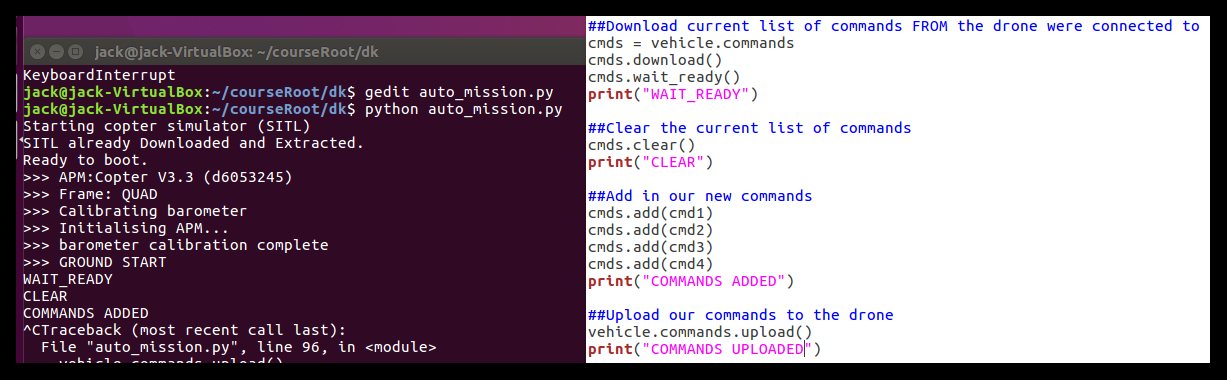
> ##Download current list of commands FROM the drone were connected to
> cmds = vehicle.commands
> cmds.download()
> cmds.wait_ready()
>
> ##Clear the current list of commands
> cmds.clear()
>
> ##Add in our new commands
> cmds.add(cmd1)
> cmds.add(cmd2)
> cmds.add(cmd3)
> cmds.add(cmd4)
>
> ##Upload our commands to the drone
> vehicle.commands.upload()
>
>
> arm_and_takeoff(10)
>
> print("after arm and takeoff")
> vehicle.mode = VehicleMode("AUTO")
> while vehicle.mode!="AUTO":
> time.sleep(.2)
>
> while vehicle.location.global_relative_frame.alt>2:
> print("Drone is executing mission, but we can still run code")
> time.sleep(2)
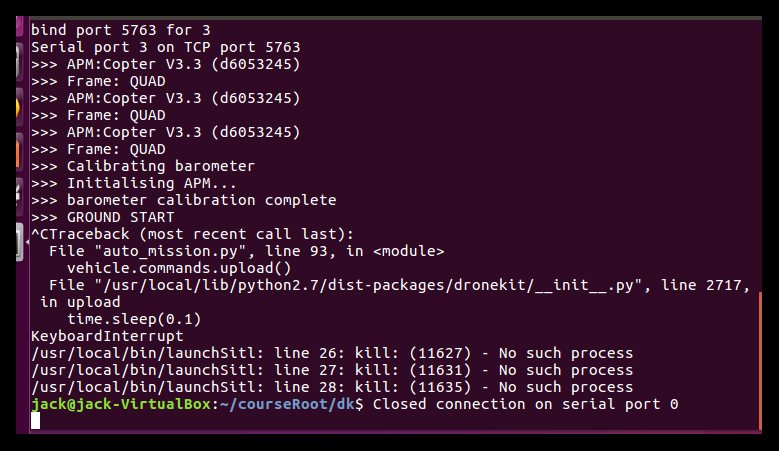
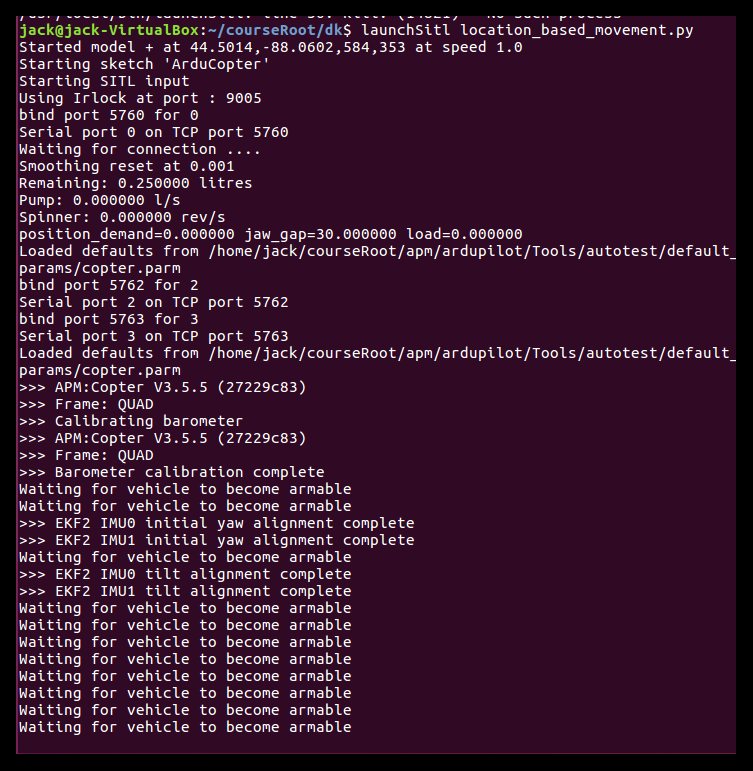
When I run it I get the following, where it just stops -
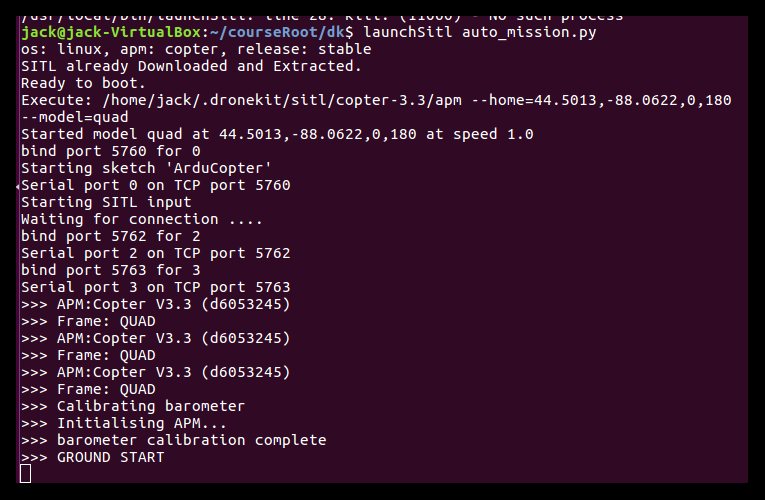
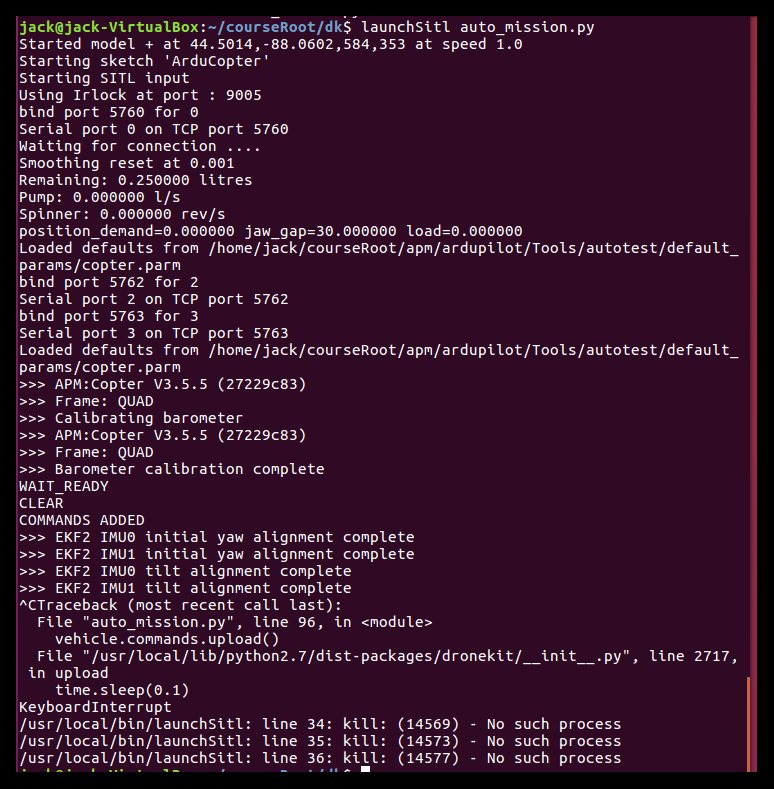
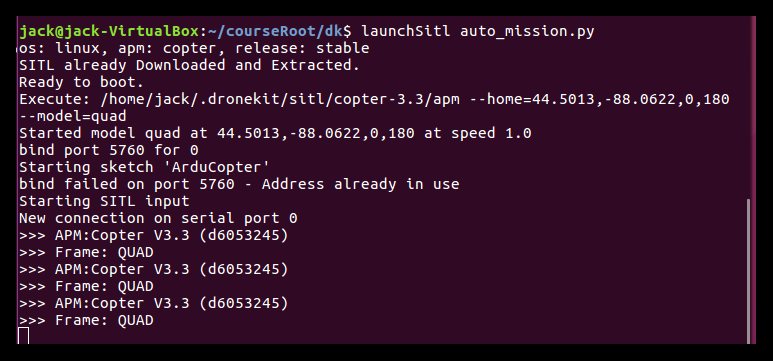
I have to Crtl-C to get out, and when I try again I get a slightly different result
Jack