Hi!
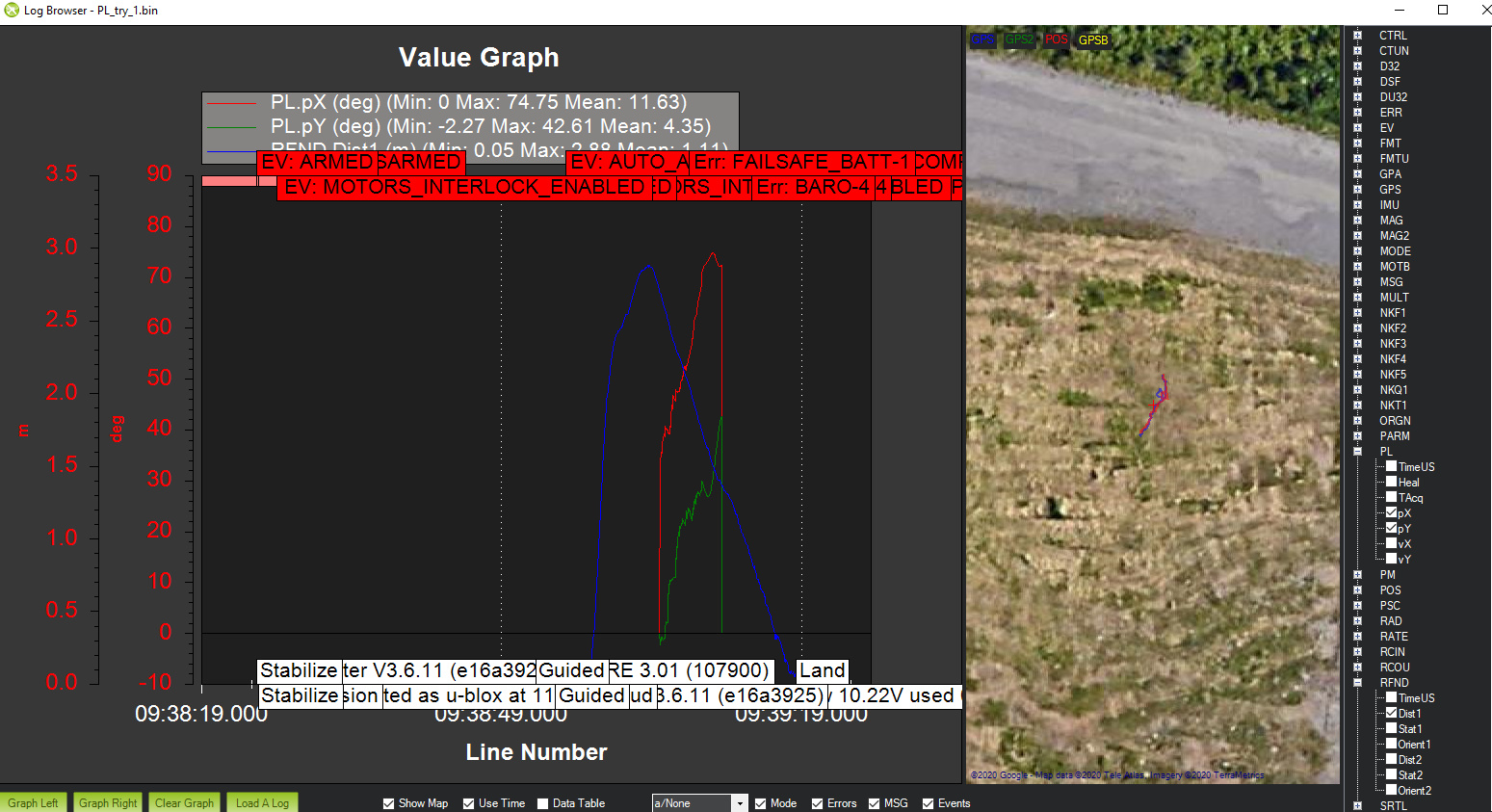
I’m trying out the precision landing on aruco marker for the first time and encountered some issues, the drone doesn’t appear to be pitching backwards in the y direction to position itself on the aruco marker.
It has no problem finding the marker, my calibration at 800x600 appears to be fine with the aruco testing script and I get an FPS of 17 when landing with precision_landing_single_aruco.py. It consistently lands about 2 feet in the positive y direction from the marker, x is usually spot on, but this might be luck considering it takes off directly above the marker.
Q1: My takeoff height is set to 2m, is this enough altitude for the drone to have time to properly land? (I assume it is)
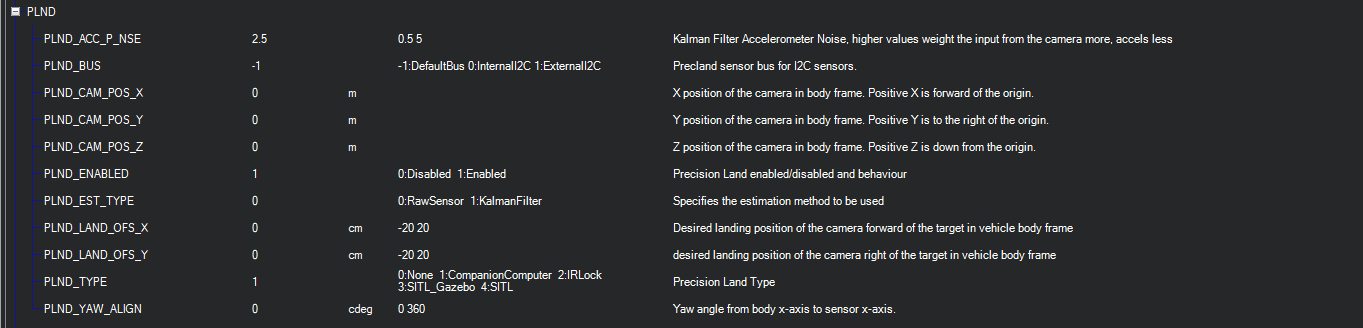
Q2: Unfortunately I had to call it in due to the rain today, but I noticed one parameter I have that may be causing the problem:

I (unknowingly) had LAND_REPOSITION set to 1. Could this be interfering the dronekit message_factory.landing_target_encode ?
Note that I’m using the default PID tuning at 4.5 since I find the drone flies best at its default values, by trial.
Any feedback is appreciated!
Caleb, it would be helpful to the course material if you could provide your paremeter list you use, so we can compare to ours and maybe find other discrepancies.