
Hi,
I started to build the kit just a few days ago. I went through all the steps in “21 Part Drone Building Video Manual”. It was certainly not enough to fly the drone so I started to work on “How to Build a Raspberry Pi Drone”. I am at step “Diagnosing Your Drone’s Problems”. I have the PixHawk powered by the PC and connected through telemetry. The messages in the ArduPilot are as follows.
7/21/2021 11:19:19 AM : PreArm: Board (4.2v) out of range 4.3-5.8v
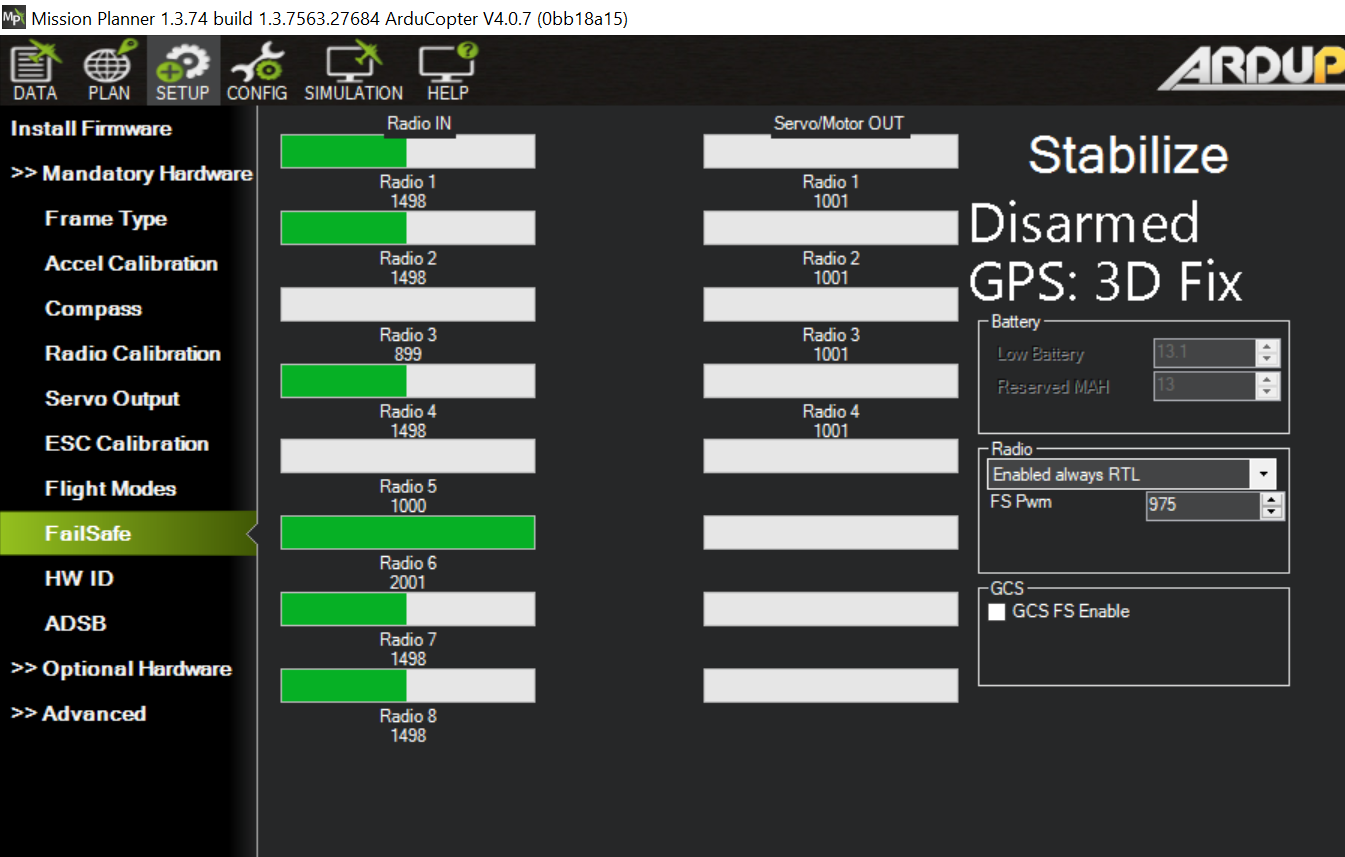
7/21/2021 11:19:19 AM : PreArm: Radio failsafe on
7/21/2021 11:19:19 AM : PreArm: Throttle below Failsafe
7/21/2021 11:18:49 AM : PreArm: Board (4.1v) out of range 4.3-5.8v
7/21/2021 11:18:49 AM : PreArm: Radio failsafe on
7/21/2021 11:18:49 AM : PreArm: Throttle below Failsafe
7/21/2021 11:18:27 AM : Frame: QUAD
7/21/2021 11:18:27 AM : RCOut: PWM:1-12
7/21/2021 11:18:27 AM : Pixhawk1 004B001C 30395108 36373532
7/21/2021 11:18:27 AM : ChibiOS: d4fce84e
7/21/2021 11:18:27 AM : ArduCopter V4.0.7 (0bb18a15)
7/21/2021 11:18:26 AM : Frame: QUAD
7/21/2021 11:18:26 AM : RCOut: PWM:1-12
7/21/2021 11:18:26 AM : Pixhawk1 004B001C 30395108 36373532
7/21/2021 11:18:26 AM : ChibiOS: d4fce84e
7/21/2021 11:18:26 AM : ArduCopter V4.0.7 (0bb18a15)
I am unable to move the motors. I also connected the battery still no movement. Battery is fully charged.
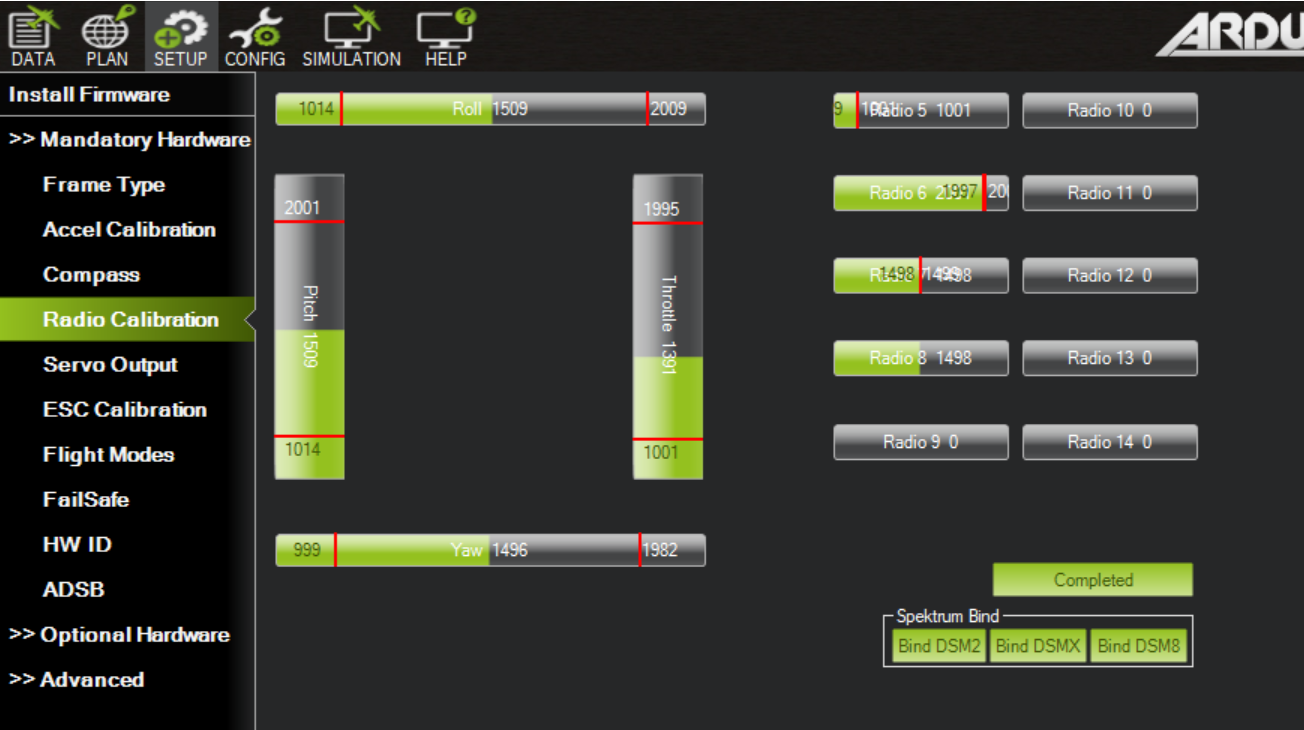
Radios are calibrated.
Any suggestions?
-Ali