My drone seems to be exhibiting many odd behaviours compared to what I’m seeing in the video tutorials.
I’m not sure if this is a set of different issues playing up, or if they’re all interrelated, so have put this all in one post in case the latter.
The main symptoms are:
- Motors beeping every second, twitching in time with beep
- Inability to calibrate ESCs / yellow lights flashing on Pixhawk
- Inability to upgrade sudo
- Inexplicitly deleting ssh and wpa_supplicant.conf files on Pixhawk micro-card
- [new] raspberry pi lights going off after a couple of seconds
More details:
1 - Motors beeping every second, twitching in time with beep.
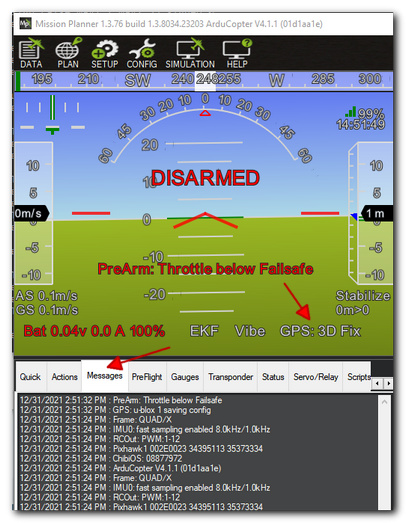
This seems identical to the issue described here: Motor sound? However, pressing the safety switch does not seem to have any effect. As the yellow light is always flashing on the Pixhawk unit (after initial red & blue flash), I guess I’m not getting to the “armed” stage, which is why the beeping is perpetual.
2 - Inability to calibrate ESCs / yellow lights flashing on Pixhawk
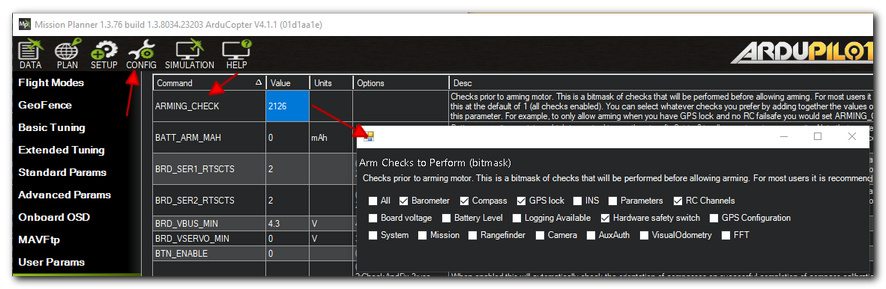
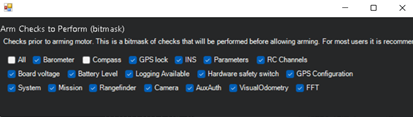
This seems similar to Can't get ESCs to calibrate - Pixhawk fails pre-arm checks As with Mongoose I have been able to update the Pixhawk firmware (to 4.1.2), however I am unable to calibrate the ESCs (following this video https://dojofordrones.com/topic/calibrate-escs-x6b-receiver/ ) it has the following differences:
- Motors beeping every second (only when battery plugged in)
- Main Pixhawk light flashing twice yellow repeatedly (after initial 10x yellow, 2xred 2xblue & only when battery plugged in)
- No beep when safety switch pressed after restart
- No “do-do, dooo” beeps when lowering the throttle (@1:46)
I have followed the guidance on that thread and calibrated the accelerometers and the compass, and have tried it outside away from buildings to get better GPS. None of that solved the issue.
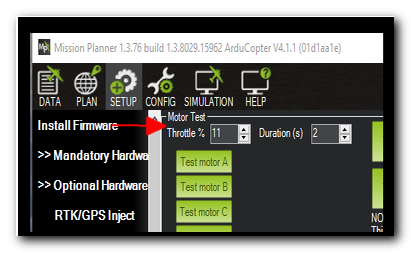
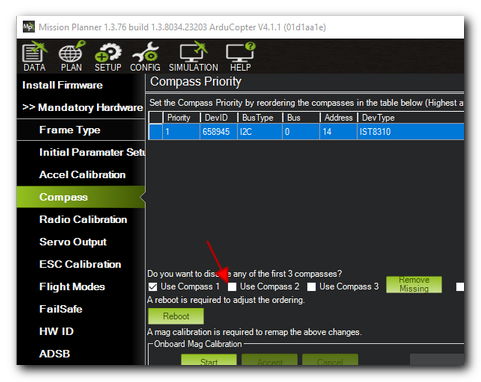
There are different behaviours when I tried the ESC calibration via Mission Planner. Steps taken were:
- Drone unpowered, plugged in Pixhawk via USB, connect via Mission Planner (COM4-1-GENERIC as COM6 - shown in videos - was not an option)
- Go to SETUP > Mandatory Hardware > ESC Calibration, click “Calibrate ESC” button
- Disconnected USB (no battery in place)
- Switched on Transmitter, moved throttle up to max
- Plugged in battery – this time the Pixhawk continued to flash blue & red rather than yellow
- Held down the safety switch – this time it made a buzz, like the dojofordrones video showed when calibrating ESC without Mission Planner
- Moved the throttle on the transmitter down to the bottom, but unlike the dojofordrones video, there were no “do-do, dooo” happy beeps, and so I think the ESC calibration didn’t happen
The transmitter has been binded to the receiver, with the transmitter beeping as you would expect when the drone is unpowered (ie when connection lost)
3 - Inability to upgrade sudo:
Following this video https://www.youtube.com/watch?v=kB9YyG2V-nA (linked from here Communicating with Raspberry Pi via MAVLink) @21:30 I tried to update sudo.
Sudo apt-get update
Works like a charm 
Sudo apt-get upgrade
Breaks  . Each time I try this, it gets as far as
. Each time I try this, it gets as far as
Unpacking raspberrypi-net-mods (1.3.3) over (1.3.0) …
And then nothing happens: eventually PuTTY comes up with the error message “Network error: Software caused connection abort”. I have copied down the preceding 17 pages of console print out, in case that is helpful for diagnosis.
At this point it is not possible to reconnect to the raspberry pi via wifi. When I then plug the SD card back into my computer, the ssh and wpa_supplicant.conf files have disappeared. Even when adding them back in, I am unable to reconnect via wifi.
When trying to “start from scratch” with a new image of the Raspberry Pi OS Lite, I have also tried downloaded this file again incase there was some corruption on downloading.
4 - Deleting files on Pixhawk micro-card
After the issues outlined in 3 (unable to upgrade sudo), I tried using etcher to generate a new image on the SD card and trying again with upgrading sudo. I also tried this with a reformat of the SD before running etcher.
Multiple times I would find:
- Run etcher
- Unplug USB and reinsert
-
sshandwpa_supplicant.confnot present, so copy these files across to boot directory - eject D drive, take out USB & reinsert
- check the ssh and wpa_supplicant.conf are still definitely there
- eject D drive, take out USB, insert SD card into raspberry pi, plug in battery to drone
- after quite a while, still unable to find drone on Advance IP Scanner, and unable to connect via PuTTY, unplug batter to done, take out SD card and reinsert into computer
- The
sshandwpa_supplicant.conffiles had completely disappeared!!
Often when I inserted the USB, Windows claimed there were errors with it and offered to scan and repair. Eventually I chose this option rather than ignoring the error, but even then, after scanning, Windows happily said it found no errors (rather than having repaired any).
When I reformatted the SD card, I used the device default options - these were:
- Capacity: 256 MB (this was the only option, but the SD card says it’s 16GB
- File system: FAT 32
- Allocation unit size: 512 bytes
- Volume label: boot
After reformatting, when I go to properties on the SD card, it says 48 MB used space out of 252 MB capacity, vs 16GB labelled on the side of the card.
5 - Raspberry pi lights going off after a couple of seconds
This is a new one for today… (no symptoms of this before today, no action I can think of that would have caused this overnight). When plugging the battery into the drone:
- Makes usual beeps (plus the motor beeping)
- Raspberry pi red light goes on, yellow flickers a bit, then both red and yellow lights go off and stay off, and I cannot connect via wifi
- Receiver, telemetry, and Pixhawk lights all stay on / flash as before
At least with the Raspberry pi no longer working, it no longer deletes the ssh and wpa_supplicant.conf files from the SD card….
Apologies for all the extraneous information – big problem is that I just don’t know which bits are extraneous.
Apart from that: Everything. Is. Fine. 

 . I ran through the MP esc calibration just using battery power & telemetry, and although it avoided the yellow flashing lights again, it still does not make the “do-do, dooo” happy beeps to say the esc has been calibrated.
. I ran through the MP esc calibration just using battery power & telemetry, and although it avoided the yellow flashing lights again, it still does not make the “do-do, dooo” happy beeps to say the esc has been calibrated.