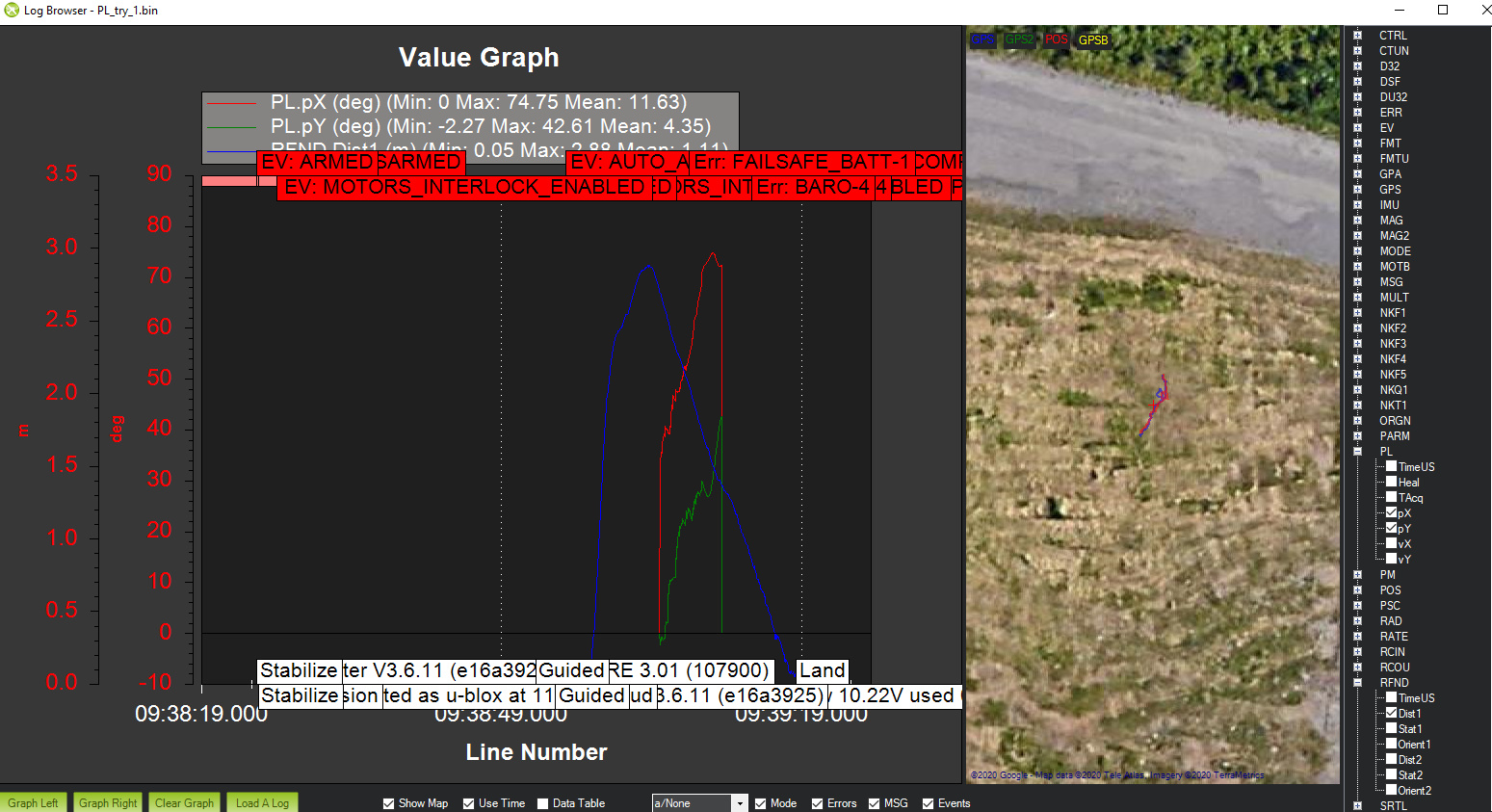
The dataflash shows non-zero values for pX and pY, the lidar seems to be reporting accurately. I’m using a TFmini-S via UART.
My PL parameters are:
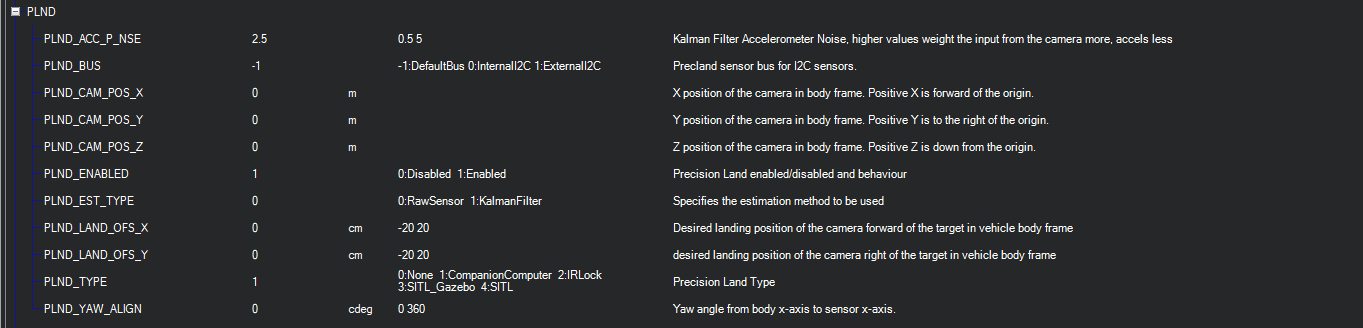
Is there a lesson in the course that goes over modifying the PLND parameters? They seem to be usable as is.
If everything seems “normal”, it would seem like the pid really would be to blame then. I’ll be trying the autotune this week. I’d appreciate if you can take a look at my dataflash log in the mean time! I cannot attach .bin files to the forum however, is there another way to send them?
Thanks!