Hi folks,
I did the ArduPilot ESC calibration and the one initiating calibration with the throttle up and power cycling.
So far 2 of the ESCs do the really nice beeping thing when attached to power without a control signal. But the other 2 ESCs don’t beep.
Also, the two that don’t beep seem to fidget a little and don’t spin up nearly as smooth or as fast as the other two that seem to be working fine. The two that are fidgety don’t move during the motor test at lower percentages of power but the “good ones” do.
I have what I understand to be the “newer” black SIMONK30A type.
I don’t think its a “motor screw too tight” issue because I swapped one of the motors from a “bad” arm to a good one and it ran smooth.
I would guess that the ESCs / motors should all beep about the same when no control signal is applied.
Also the “bad ones” seem to have either a different “tone” to them when “sounding off” after ESCs calibration. I could not tell if it was a higher or lower pitch, but I get two that sound one way and two that sound another way.
I also cleaned the motor connector with a q-tip and some alcohol.
Thanks a bunch.
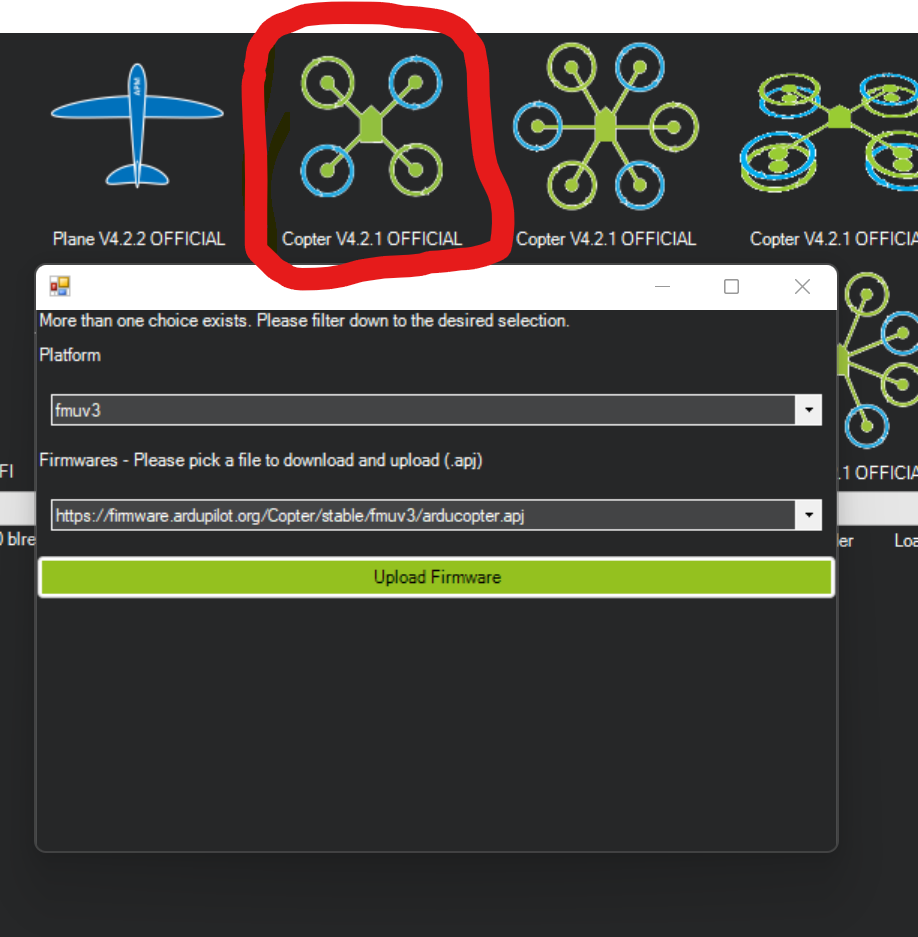
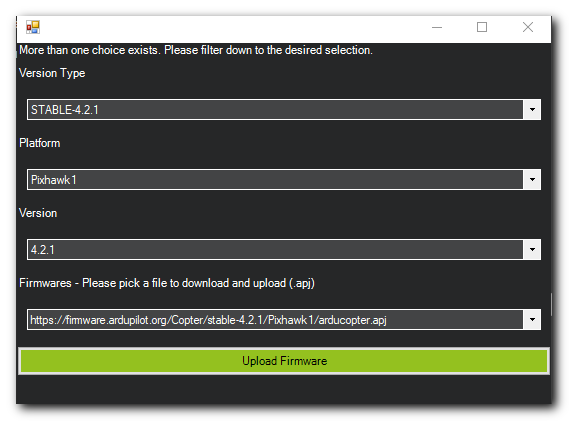
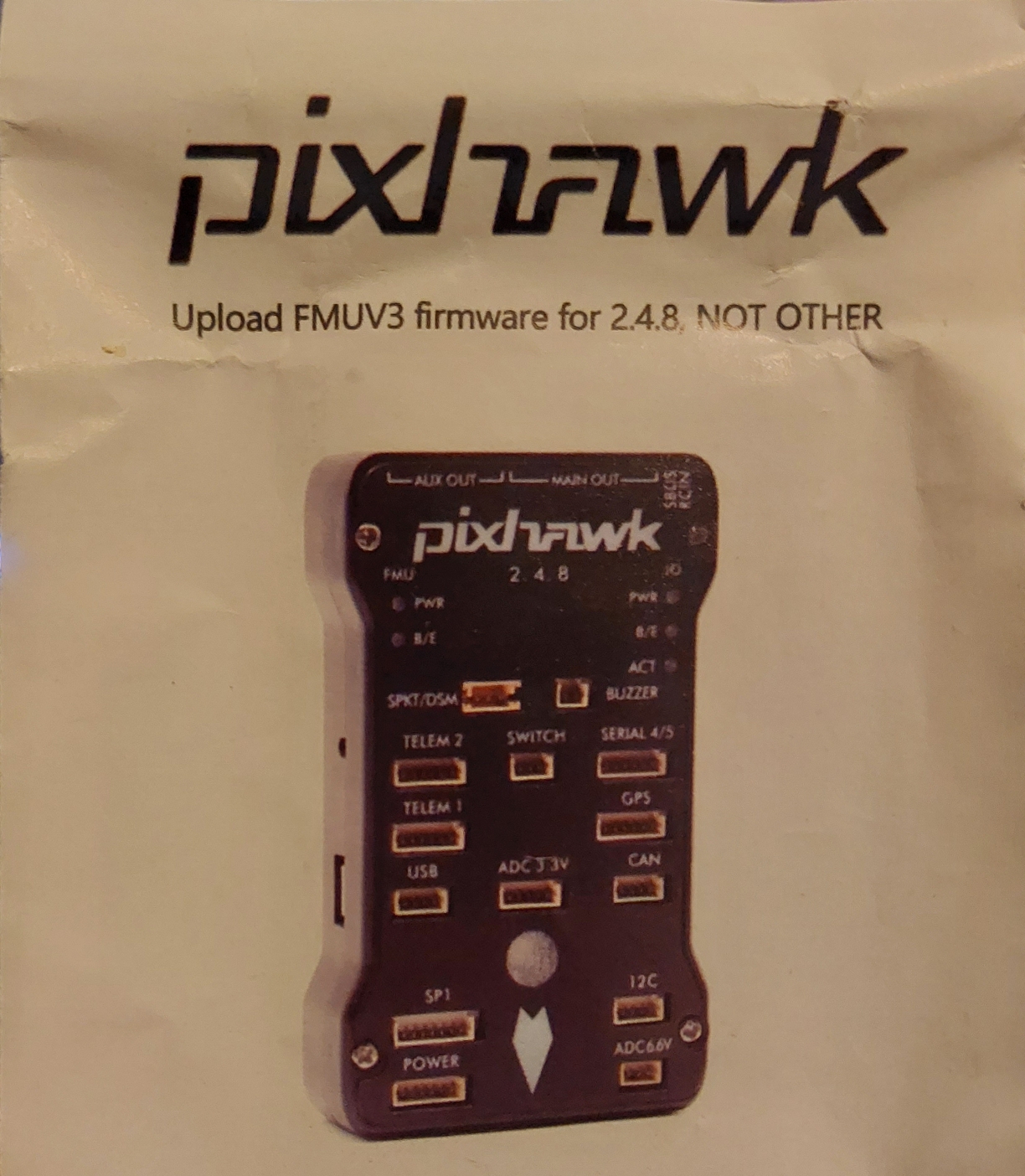
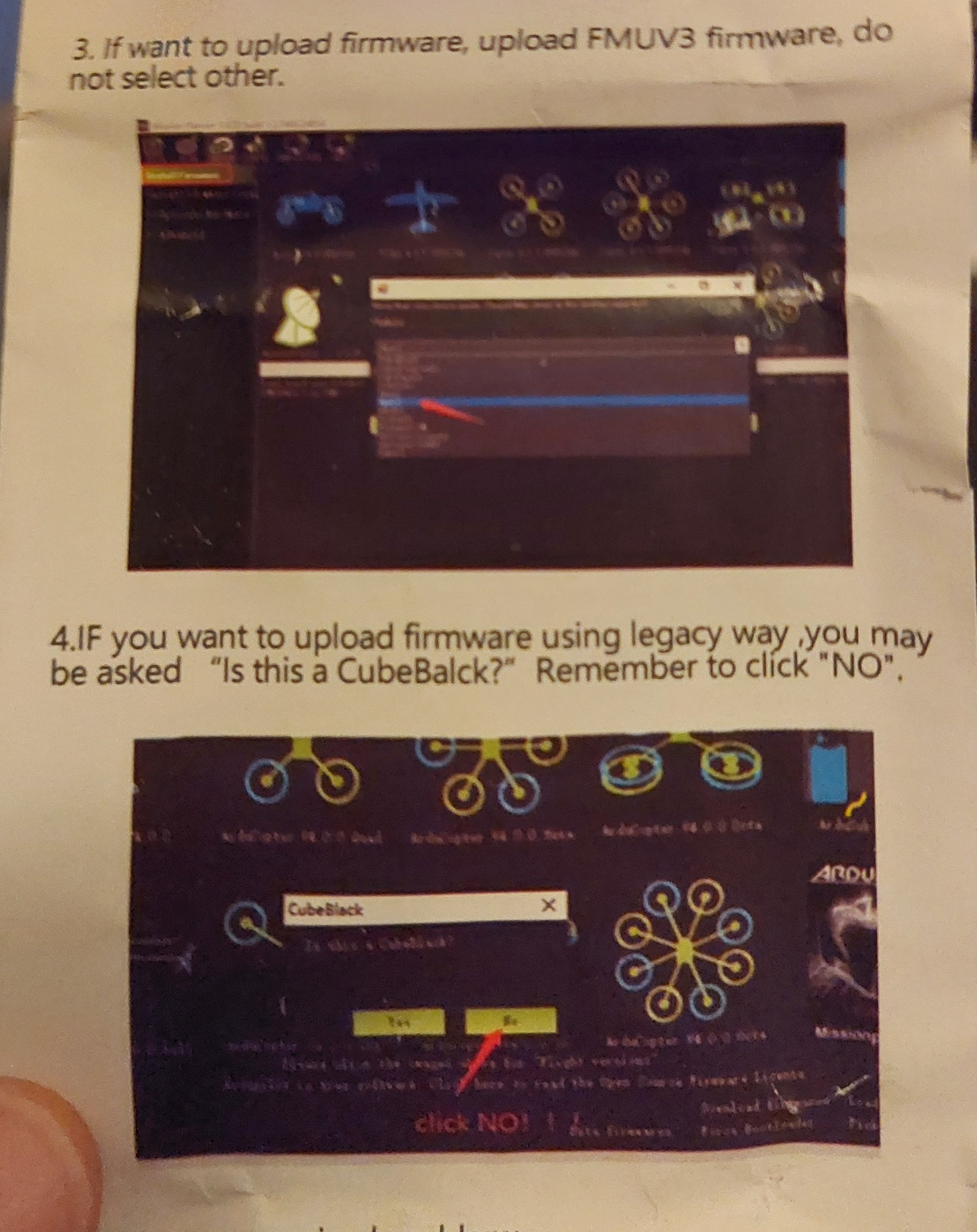
Oh, and I upgraded the firmware.